

UUV positioning-to-line recovery method based on robustness constraint model prediction control
A constraint model and predictive control technology, applied in adaptive control, general control system, control/adjustment system, etc., can solve problems such as collision between UUV and recovery platform, large overshoot, and long adjustment time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0055] The method for recovering the UUV line control position based on the robust constraint model predictive control includes the following steps:
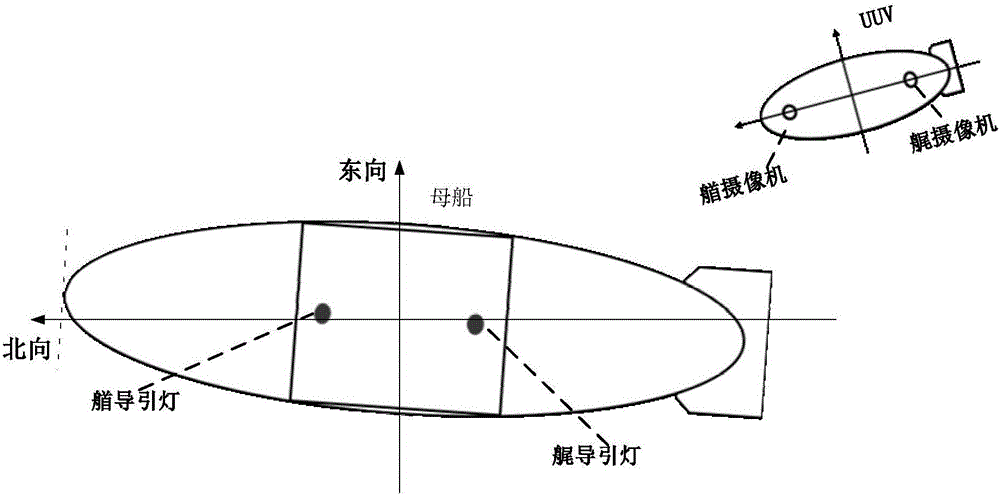
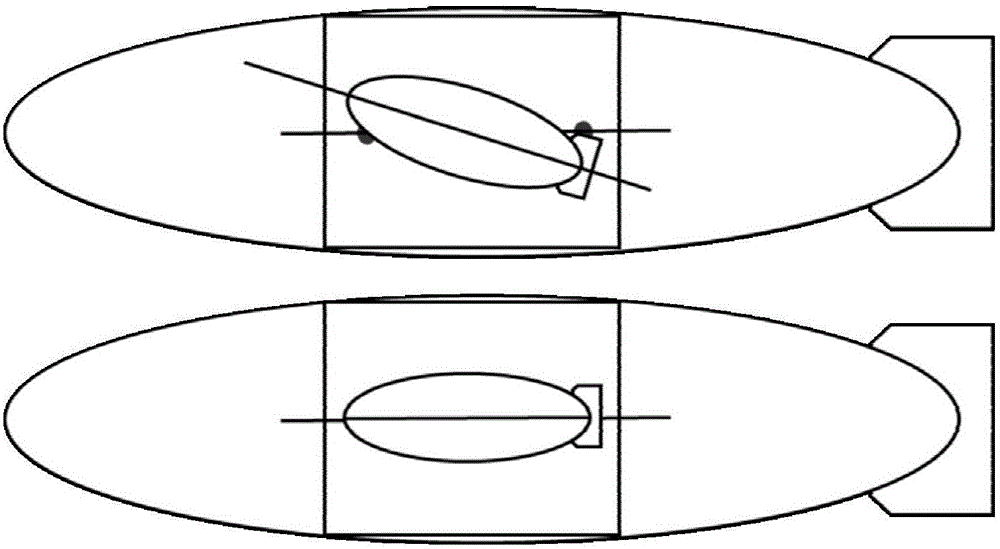
[0056] Step 1. Obtain the position deviation values △x, △y, △z, the course deviation value △ψ and the pitch angle deviation value △θ between the UUV and the mother ship through the line control method; and △x, △y, △z, △ψ, △θ are used as initialization values;
[0057] Step 2. Obtain the UUV status at the current moment:
[0058]The current moment status is obtained through a series of sensors of the UUV itself: u, v, and w are longitudinal, lateral, and vertical speeds (m / s) respectively; p, q, and r are roll angle, pitch angle, and yaw, respectively. Angular velocity (rad / s), ξ, η, ζ are the positions (m) of the UUV relative to the fixed coordinate system, θ and ψ are roll angle, pitch angle and yaw angle (rad);
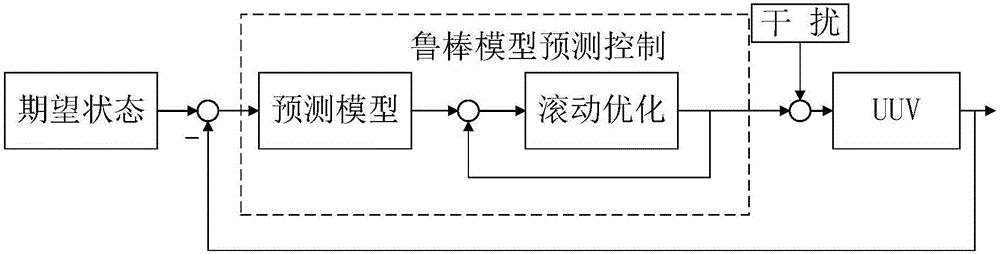
[0059] Step 3. Construct the error prediction model and calculate the system matrix Ω of the local time predi...
specific Embodiment approach 2
[0097] The specific steps of step 4 of the present embodiment are as follows:
[0098] rolling optimization problem Satisfy the following constraints:
[0099] Line of sight constraint: A L C L X(l)≤d L ,
[0100] in, A L = a 1 b 1 c 1 . . . . . ...
specific Embodiment approach 3
[0116] Line of sight constraint A described in step 4 of this embodiment L C L X(l)≤d L is obtained by the following steps:
[0117] The line of sight constraint is a convex constraint, expressed in the form of a polyhedron, and its half-space is expressed as: a j ξ+b j η+c j ζ-d j ≤0, j=1,2,…,N L , N L Half-spaces intersect to form a polyhedron, so the line-of-sight constraint can be expressed in the following form
[0118] a 1 ξ ( l ) + b 1 η ( l ) + c ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More