

Intelligent scheduling system and method for multiple automatic guided vehicles in automated wharf
A technology of automatic guided vehicles and automated docks, applied in data processing applications, forecasting, instruments, etc., can solve problems such as low decision-making efficiency, traffic congestion and deadlock, static path planning is difficult to avoid space-time interference, etc., to improve self-learning , the effect of rapid response measures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
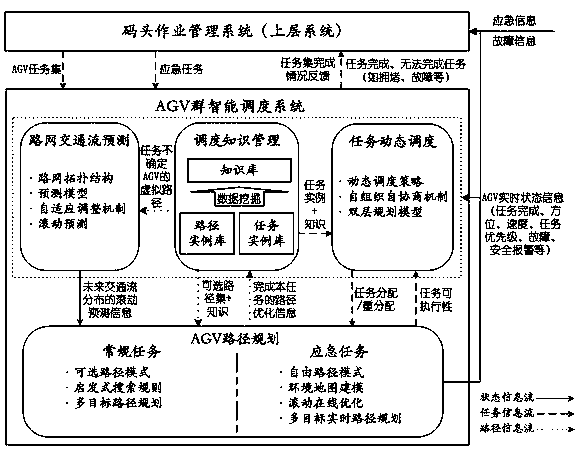
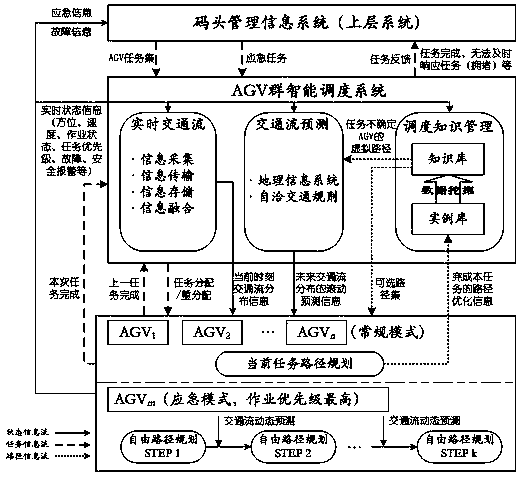
[0054] In view of the complex coupling and interaction relationship between multi-AGV task assignment and path planning (in terms of time, space, and information), this invention uses the idea of complex system decoupling to decompose each operation link into modules, separate planning and scheduling, and pass two-level The new dispatching mode delegates the task set of AGV operations, real-time feedback of AGV operation status information and rolling forecast of traffic flow, eliminating or reducing the influence of uncertain information in the complex operation environment of the terminal. Improve the intelligence level of AGV through self-decision, self-organization and self-learning, and realize the dynamic scheduling of multi-AGV collaborative operations (cooperative optimization of dynamic task allocation and dynamic path planning), so as to solve the current centralized decision-making mechanism, static task allocation and static path planning. Unresolvable node confli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More