Mechanical arm tracking and positioning on-line identification and correction method based on computer vision
A computer vision, tracking and positioning technology, applied in computer control, instrument, packaging automatic control, etc., can solve the problems of synchronization deviation, lower production efficiency, troublesome operation, etc., and achieve the effect of high measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
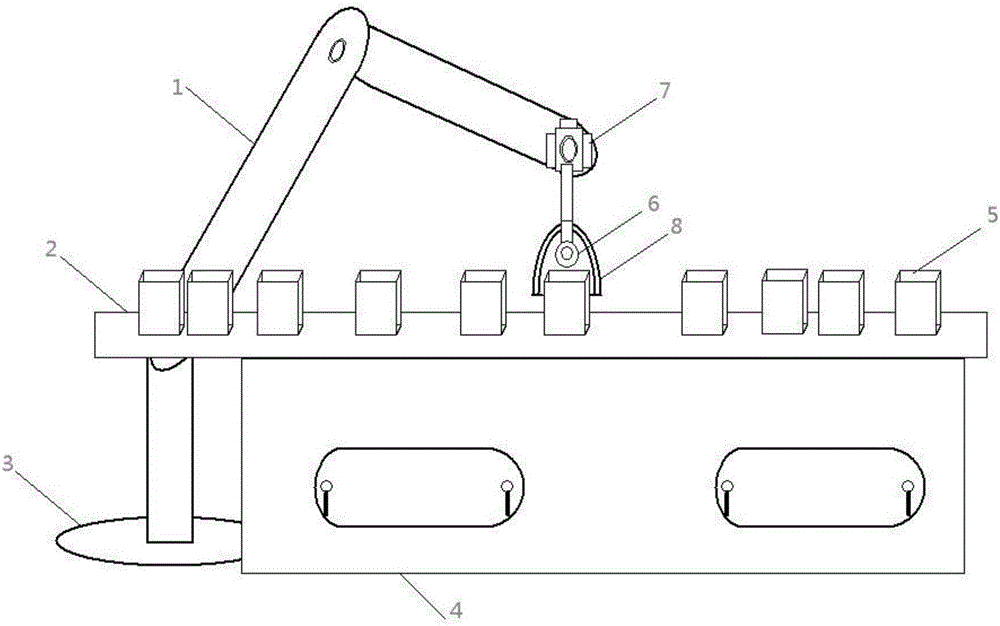
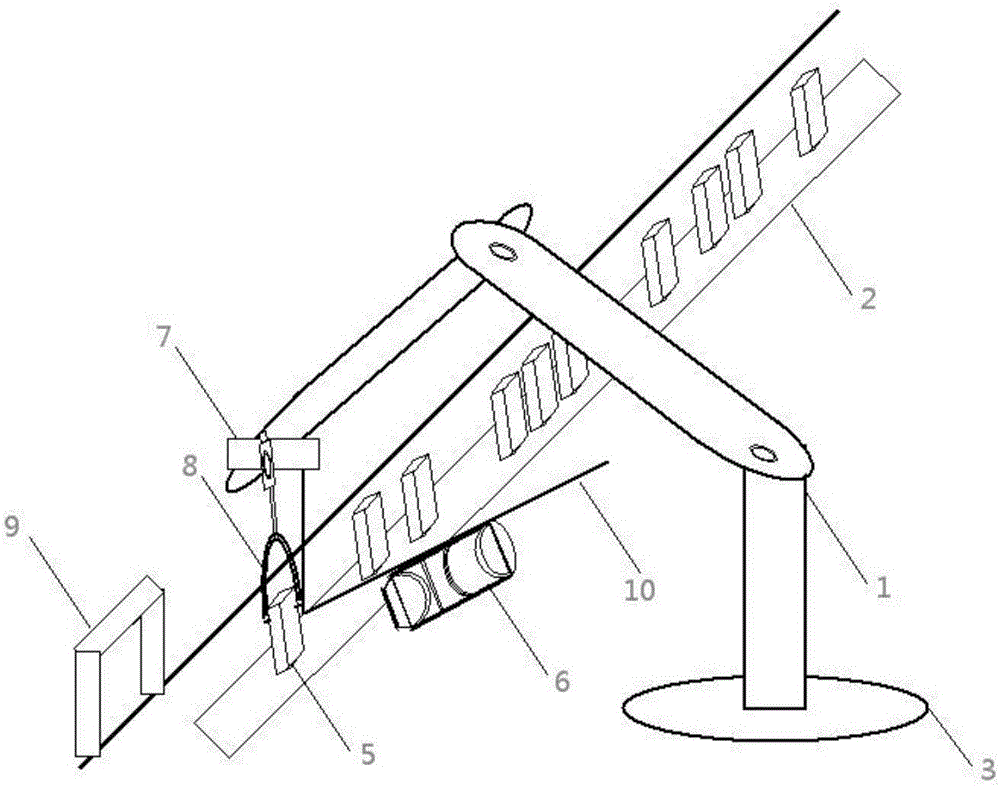
[0029] See attached figure 1, this structure is improved and perfected on the original servo multi-axis synchronous motion system structure, and the manipulator is attached to a newly added base that can rotate freely, which increases the degree of freedom of the manipulator, so that the manipulator that can only move in the plane become movable in space. The conveyor belt 2 is driven by the main shaft, responsible for transporting the moving target 5 to be tracked and positioned by the manipulator 1, and the adjacent moving targets are distributed at unequal intervals. The manipulator 1 has multiple degrees of freedom, and the horizontal and vertical directions are respectively controlled by independent servo motors. Control, and the base 3 of the manipulator 1 is also controlled by an independent servo motor to achieve free rotation, so that the manipulator 1 can reach the position within the specified range of space, and the servo motor controlling the manipulator 1 is used...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com