

Quadrotor unmanned aerial vehicle control method
A technology of a quadrotor unmanned aerial vehicle and a control method, which is applied in the field of quadrotor unmanned aerial vehicle control based on global sliding mode control, can solve the problems of control performance influence and high order, and achieves the advantages of improving fast response and speeding up dynamic response speed. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] The present invention will be described in further detail below in conjunction with the accompanying drawings.
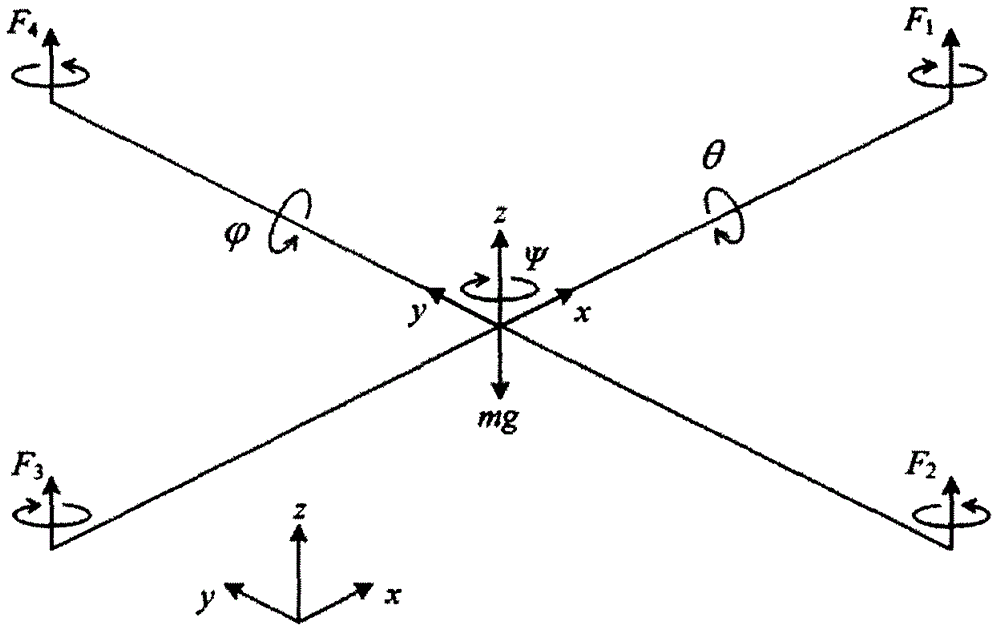
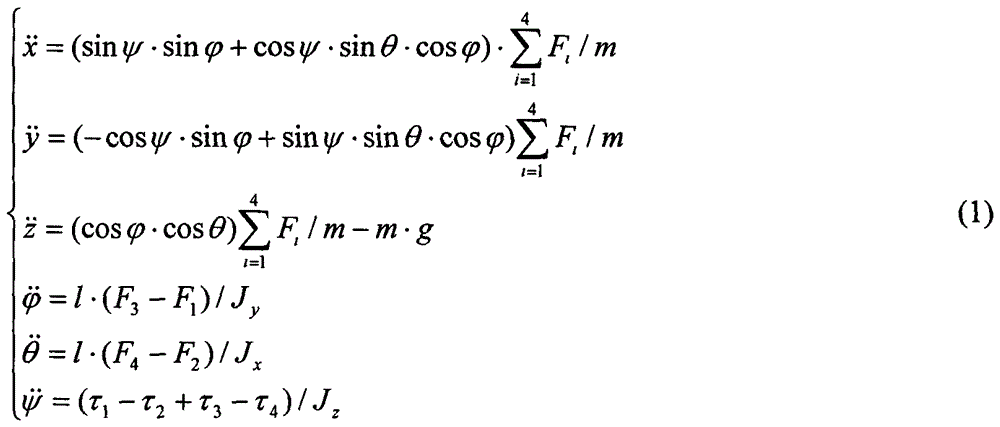
[0010] according to figure 1 The schematic diagram of the quadrotor UAV model, the nonlinear model of the quadrotor UAV can be established as:
[0011]
[0012] Among them, (x, y, z) is the position coordinates of the quadrotor UAV, θ, and ψ are the roll angle, pitch angle and yaw angle of the quadrotor UAV, respectively, F i Indicates the lift generated by the i-th rotor, τ i is the flight angle torque generated by the i-th rotor, where i=1,2,3,4. l is the distance from the rotor center to the geometric center of the quadrotor UAV, m is the mass of the quadrotor UAV, g is the acceleration of gravity, (J x , J y , J z ) are the moments of inertia of the quadrotor UAV around the x, y, and z axes, respectively.
[0013] The state variables of the quadrotor UAV system can be expressed as Among them, T represents the transpose, the system state x, y ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More