

Welding robot offline programming system based on tablet computer, and offline programming method thereof
A welding robot and off-line programming technology, applied in general control systems, visual/graphic programming, control/adjustment systems, etc. Verification waiting time, reduction of errors and unnecessary risks, effects of strong editing capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solution of the present invention will be further introduced below in combination with specific embodiments.
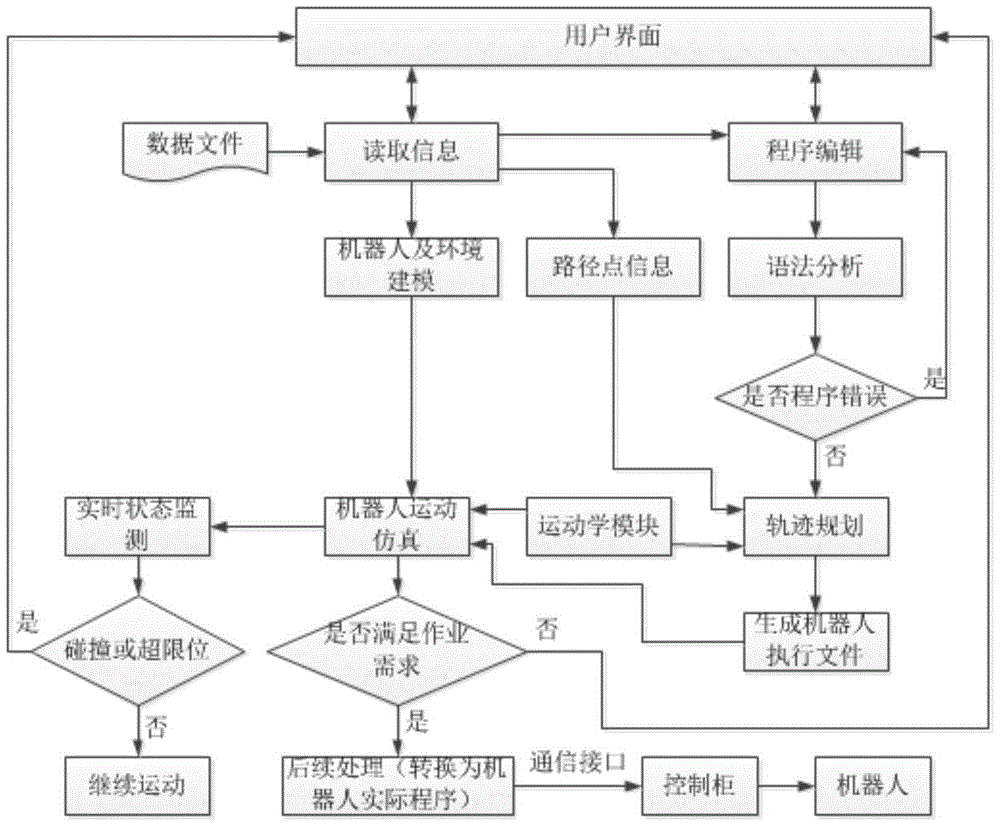
[0024] The invention discloses an off-line programming system for a welding robot based on a tablet computer, including a system modeling module, a kinematics simulation module, a trajectory planning module, an automatic programming module, a state detection module and a communication module, wherein:
[0025] System modeling module: Based on the 3DSMAX platform, use MaxScript language to efficiently develop the robot and the surrounding 3D simulation module. According to the structural characteristics of the six-degree-of-freedom robot, use the OpenGL graphics library under Linux to establish a visual virtual environment of the robot and the surrounding environment. environment, simulating the actual working process of the welding robot.
[0026] Kinematics simulation module: The simulation content includes solving the kinematics positive solutio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More