

Underwater robot power magnetically controlled switching device and control method thereof
A technology of underwater robot and magnetic control switch, which is applied in the direction of control/regulation system, output power conversion device, instrument, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below with reference to the accompanying drawings.
[0032] In order to realize the non-contact control of the power switch in the watertight and pressure-resistant cabin of the underwater robot, with simple structure, strong anti-interference ability and convenient use, the embodiment of the present invention provides a non-contact power switch device based on a reed switch.
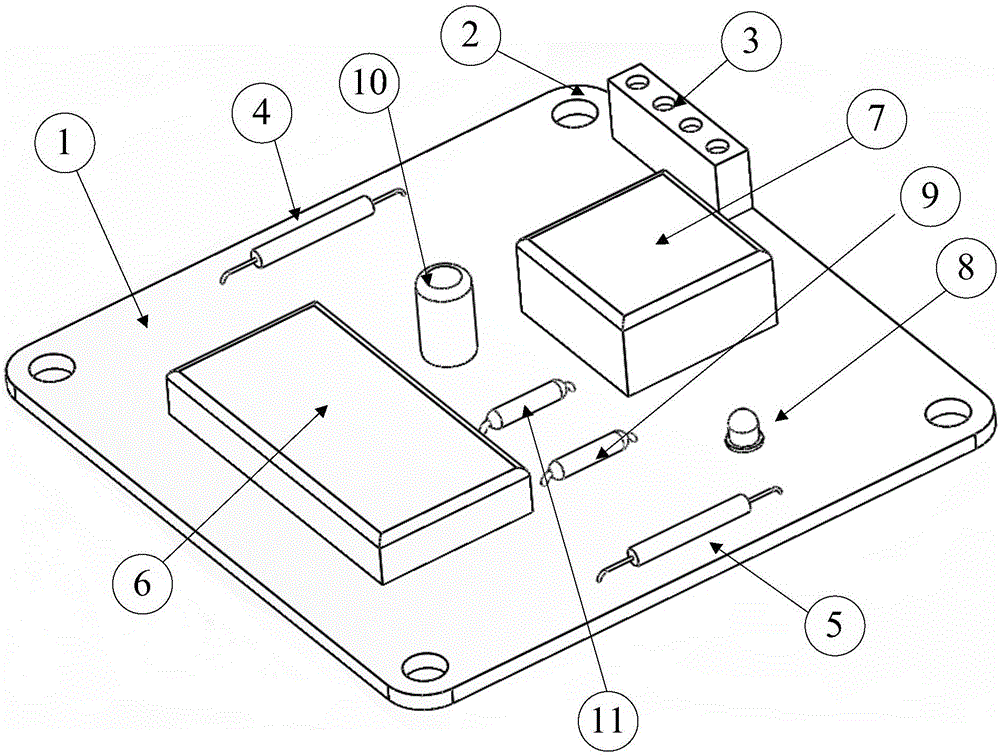
[0033] combine figure 1, the switchgear includes a base plate 1, the base plate is a rectangular printed circuit board, and the four corners have fixing holes 2 for fixing in the control cabin of the underwater robot; the base plate has welding pads and fixing holes for electronic components; The printed circuit is used to connect various components and modules; the power input and output terminals 3 are installed on the base plate; the electronic components include the same model C-type reed switch 4 and a reed switch 5, and a reed switch 5 adopt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More