

Multi-sensor fusion-based autonomous obstacle avoidance unmanned aerial vehicle system and control method
A multi-sensor fusion and control method technology, applied in three-dimensional position/channel control and other directions, can solve the problems of complex calculation and implementation process, and achieve the effect of comprehensive obstacle avoidance method, high real-time performance and broad application prospect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention is described in detail below in conjunction with accompanying drawing:
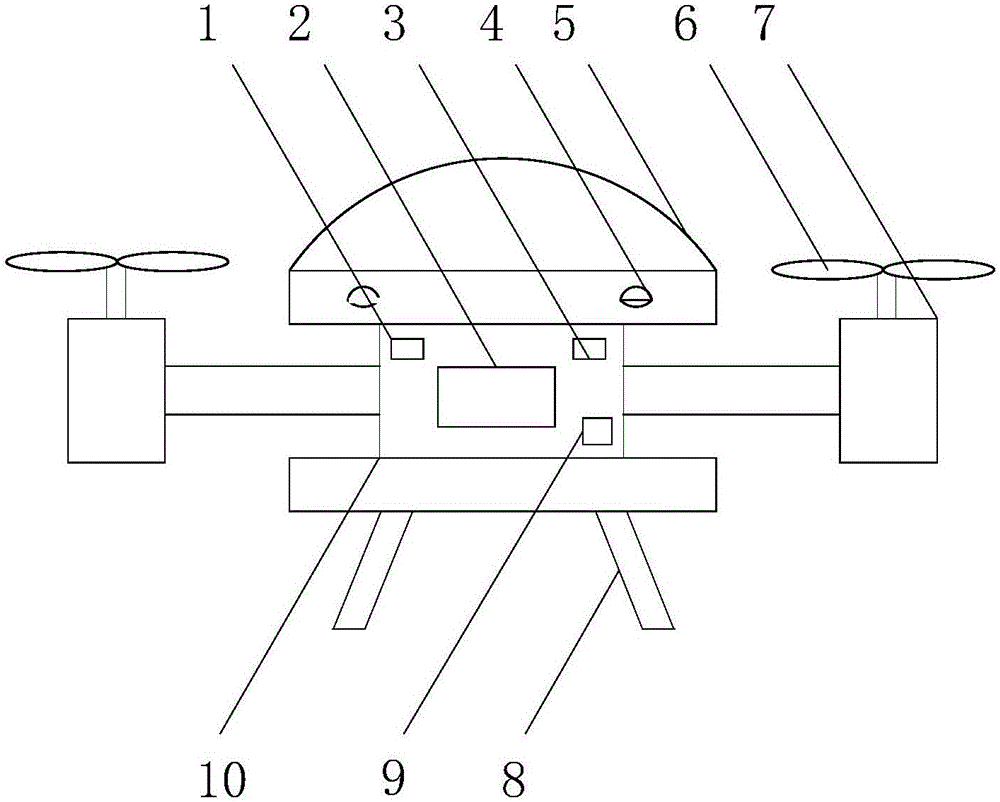
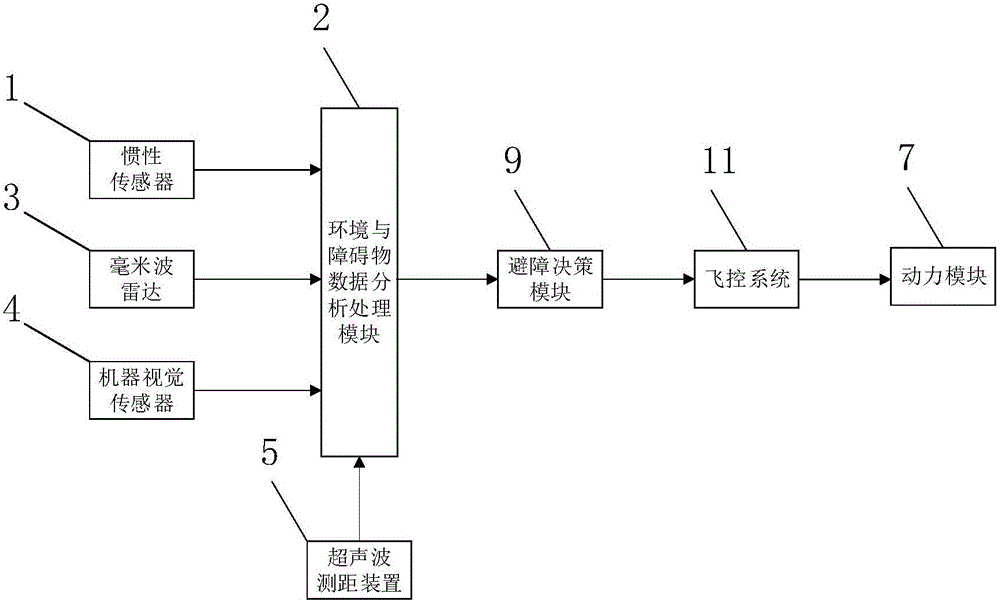
[0035] Such as Figure 1-2 As shown, an autonomous obstacle avoidance UAV system based on multi-sensor fusion includes an environment and obstacle data analysis and processing module 2, an ultrasonic device 5, a propeller 6, a power module 7, an obstacle avoidance decision module 9 and a frame 10; An environment and obstacle data analysis and processing module 2 is installed on the front and outer surfaces of the frame 10. This module is specifically a processor for analyzing and processing the environment and obstacle data. The radar 3, and the inertial sensor 1 and the forward direction millimeter-wave radar 3 are located above the environment and obstacle data analysis and processing module 2, and the obstacle avoidance decision-making module 9 is installed inside the frame 10, and the ultrasonic device 5 is installed on the frame through a fixed frame 10, and around the b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More