

Space non-cooperative target attitude joint takeover control method utilizing tether thruster
A technology of non-cooperative target and control method, applied in the field of joint takeover control of non-cooperative target attitude in space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The present invention is described in further detail below in conjunction with accompanying drawing:
[0089] see Figure 1-Figure 3 , the present invention utilizes the joint takeover control method of space non-cooperative target attitude of tether thruster, comprises the following steps:
[0090] Step 1: Establish a space non-cooperative target star attitude takeover control model
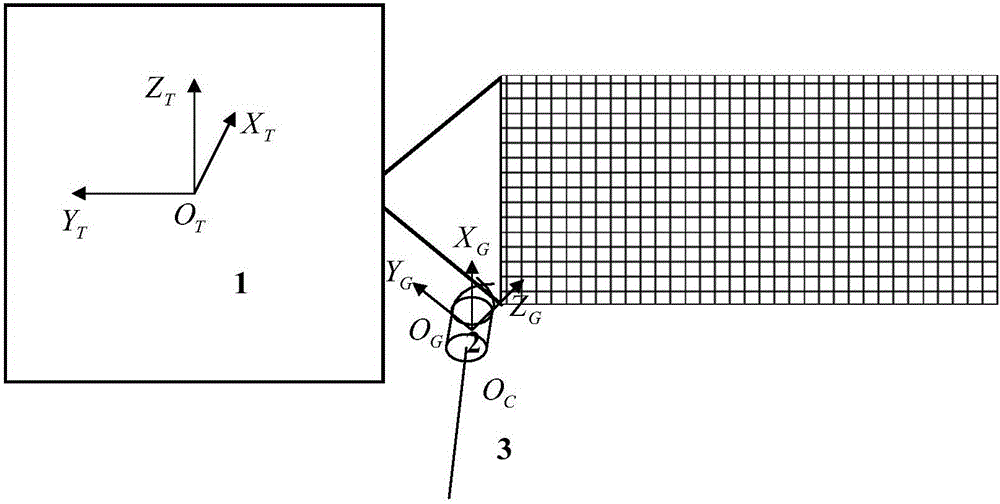
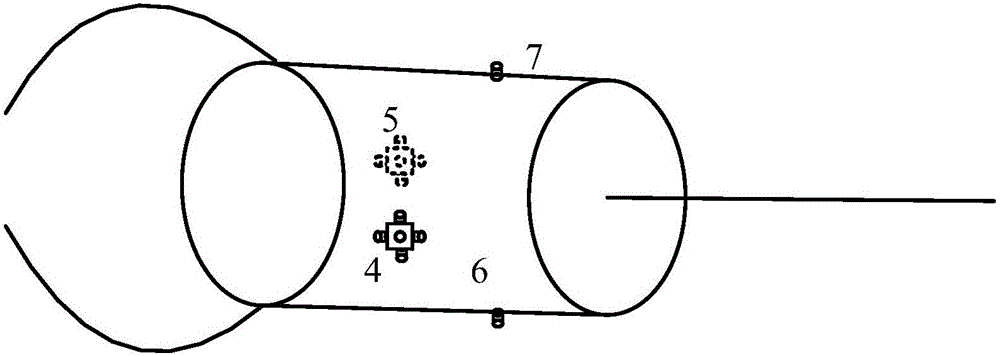
[0091] Such as figure 1 As shown, 1 is the space non-cooperative target star, 2 is the operating mechanism of the space tethered robot, and 3 is the tether of the space tethered robot. o T is the center of mass of the space non-cooperative target star, O T x T Y T Z T is the target star system, O G is the center of mass of the operating mechanism, O G x G Y G Z G For the operating mechanism system, O C It is the connection point of the tether and the operating mechanism. To simplify the modeling process, it is assumed that the coordinate axes of the two coordinate systems ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More