

Welding robot welding manipulator based on Stewart parallel mechanism
A welding manipulator, welding robot technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of personal danger of welding workers, low welding efficiency, poor welding quality, etc. High efficiency and the effect of improving the quality of welding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
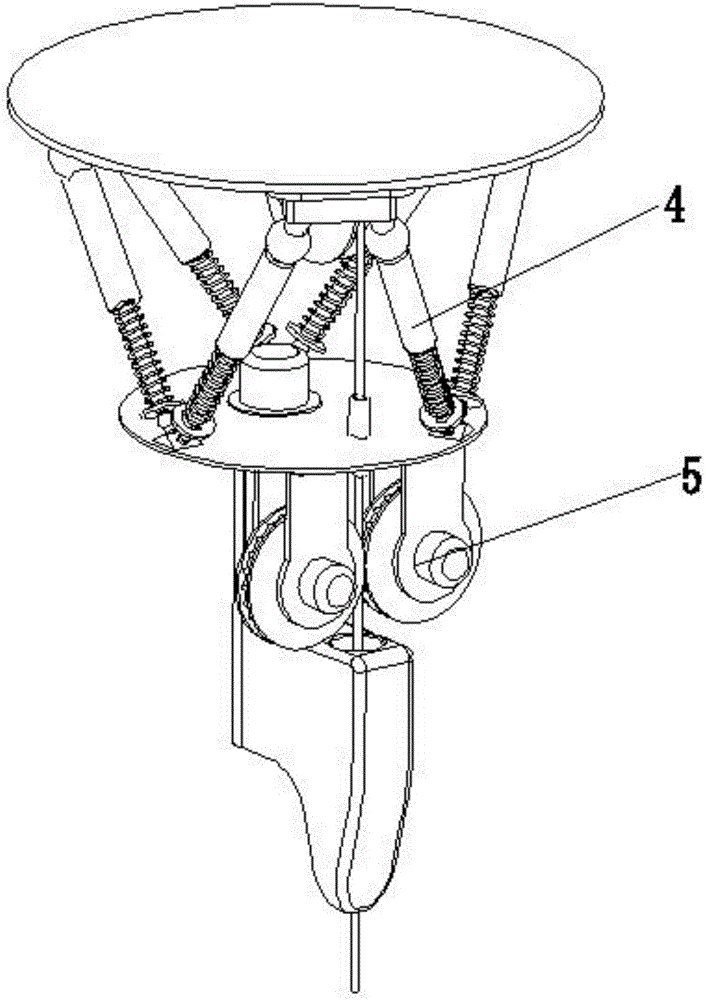
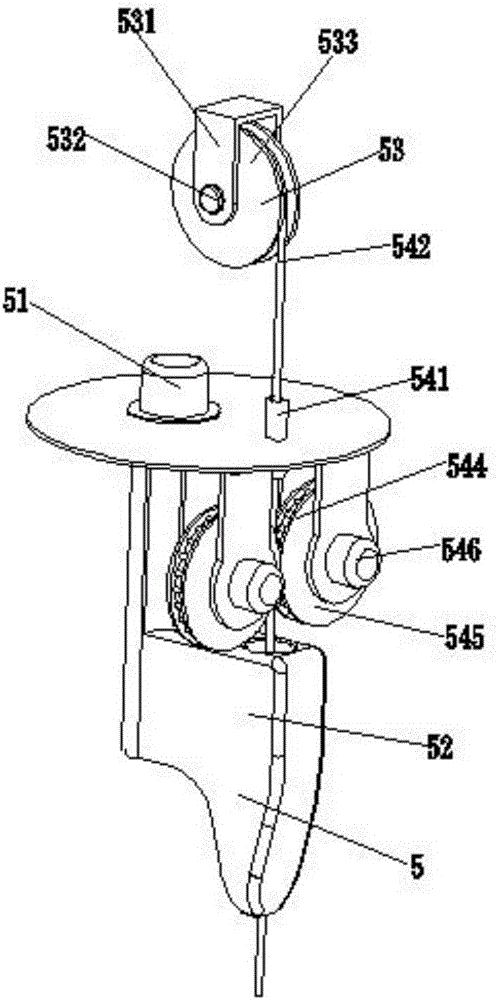
[0019] like Figure 1 to Figure 4 As shown, a welding robot welding manipulator based on the Stewart parallel mechanism includes a six-degree-of-freedom parallel mechanism 4 and a welding actuator 5; the welding actuator 5 is located directly below the six-degree-of-freedom parallel mechanism 4, and the welding actuator 5 It is fixedly connected with the parallel mechanism 4 with six degrees of freedom.
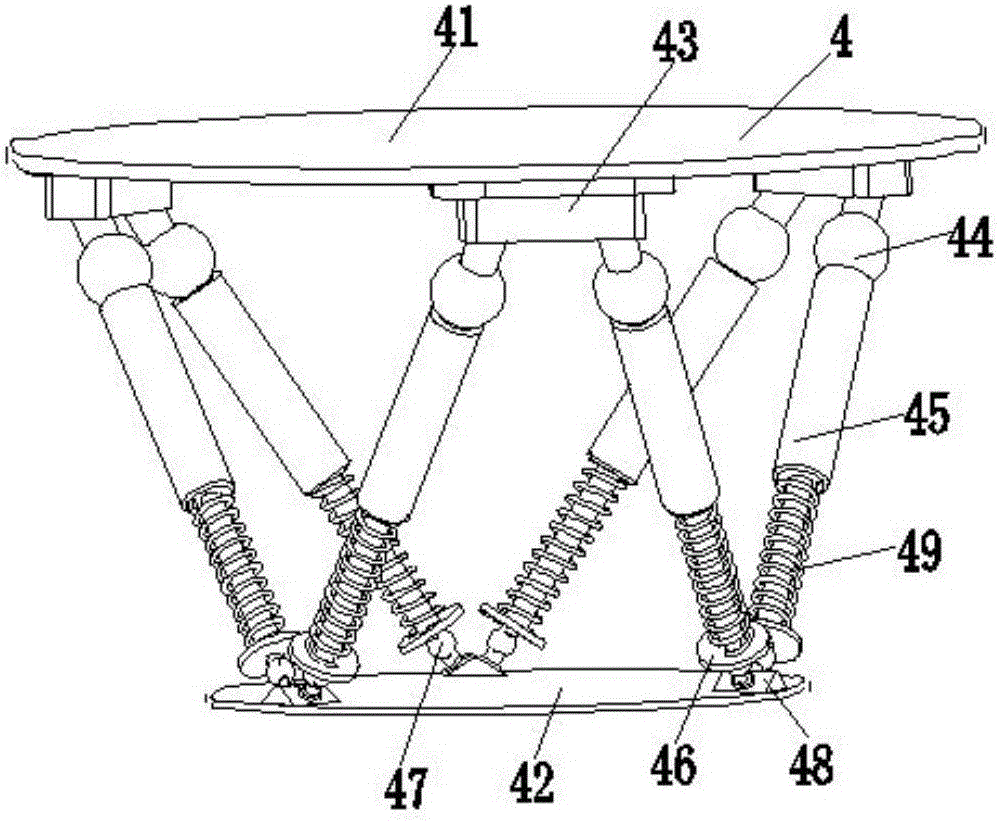
[0020] like figure 1 and figure 2 As shown, the six-degree-of-freedom parallel mechanism 4 includes a fixed platform 41, a moving platform 42, a connecting seat 43, an upper ball hinge 44, an electric push rod 45, a retaining plate seat 46, a lower ball hinge 47, a triangular seat 48 and a limiter. position spring 49; the number of the conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More