Clamping jaw type multi-freedom-degree robot manipulator mechanism
A technology of manipulator and degrees of freedom, applied in the direction of manipulator, program-controlled manipulator, chuck, etc., can solve the problems of weak grasping, inflexible device and poor effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
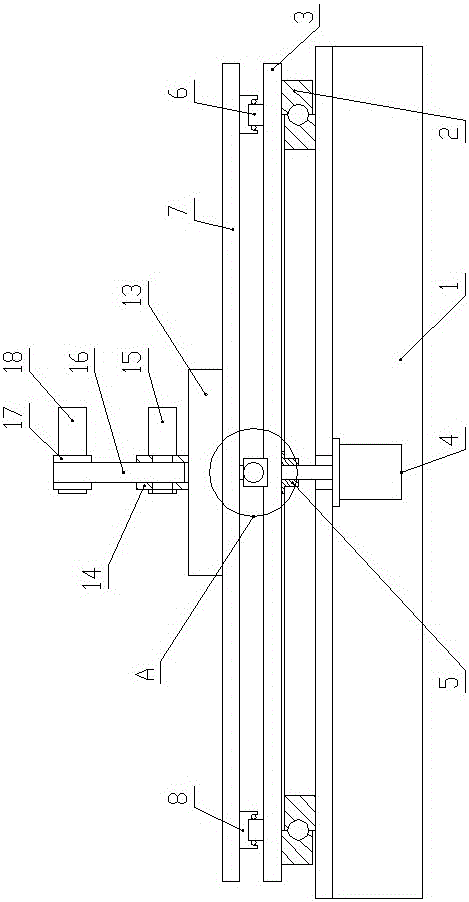
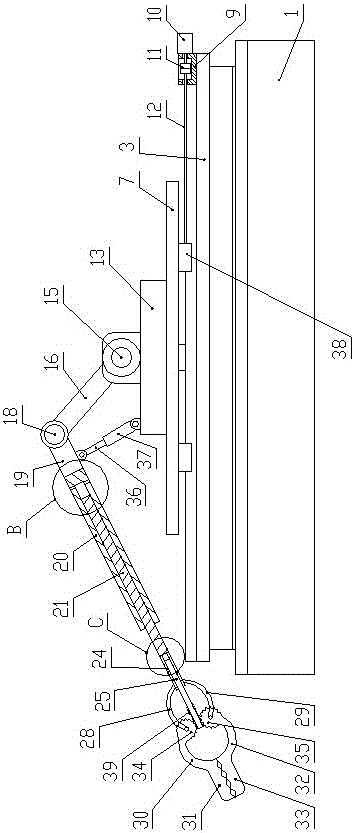
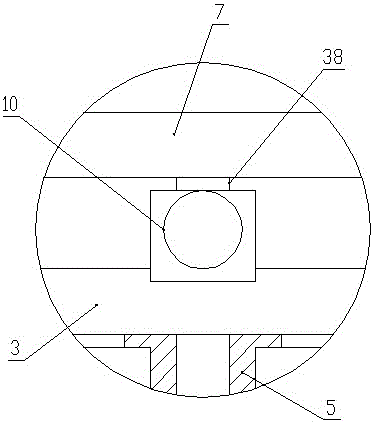
[0017] In this embodiment, with figure 1 The left direction in is left direction.
[0018] like Figure 1-5 As shown, the claw-type multi-degree-of-freedom robot manipulator mechanism of the present invention includes a frame 1, and the upper surface of the frame 1 is connected with a rotary table 3 through an axial thrust bearing 2, and the rotary table 3 and the axial thrust bearing 2 The outer ring is fixedly connected, the center of the frame 1 is vertically provided with a first stepping motor 4, the output shaft of the first stepping motor 4 passes through the center of the upper surface of the frame 1 upwards, and the upper end of the output shaft of the first stepping motor 4 is sleeved A shaft sleeve 5 is provided, the inner wall of the shaft sleeve 5 is in interference fit with the outer wall of the output shaft of the first stepping motor 4, the upper end of the shaft sleeve 5 is fixedly connected with the lower surface of the rotary table 3, and the two sides of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com