

SLAM method based on semantic bundle adjustment method
A beam adjustment method and semantic technology, applied in image data processing, instruments, calculations, etc., can solve problems such as no effective use, construction of known maps, combined evaluation of objects and cameras, etc., to achieve strong practicability and simple method , easy to achieve effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings.
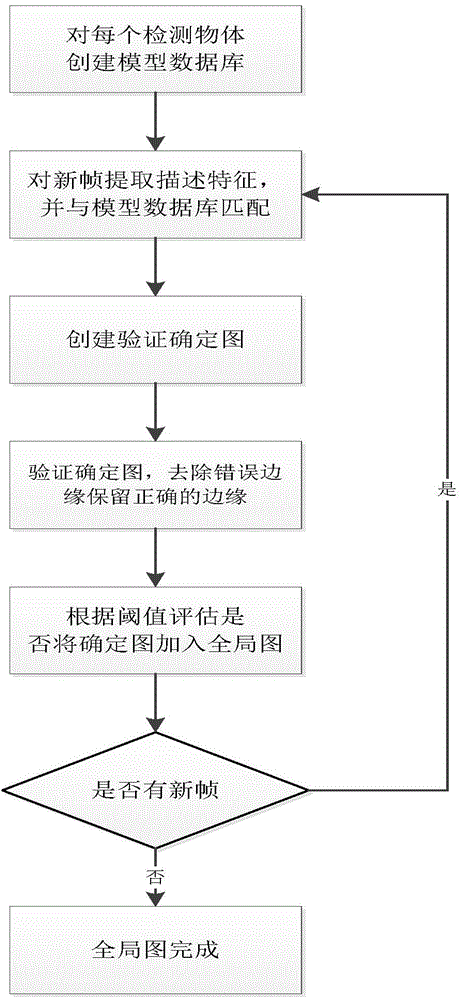
[0030] The present invention is achieved in the following manner: a SLAM method based on semantic beam adjustment, comprising the following steps:
[0031] Step 1. Determine a series of features of the detection target, and build a model database for each detection target: if the entire 3D model is available, the 3D key point detector and descriptor can be used; otherwise, the model needs to use a bunch of Normalize the image and provide 2D keypoint detectors and descriptors for the required features; the feature descriptors are saved for future matches; then, for feature locations, 3D coordinates are saved for the former, and 2D image coordinates and their associated perspective pose.
[0032] Step 2. As a new frame is available, extract the descriptive features for the new frame and match it with the model database, and then create a deterministic map for each given...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More