

Multi-unit-linear-driven compact type sliding loading robot
A linear drive and linear drive technology, which is applied to mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve problems such as poor power performance and weak load capacity, and achieve reduced energy consumption, The effect of improving the carrying capacity and good reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
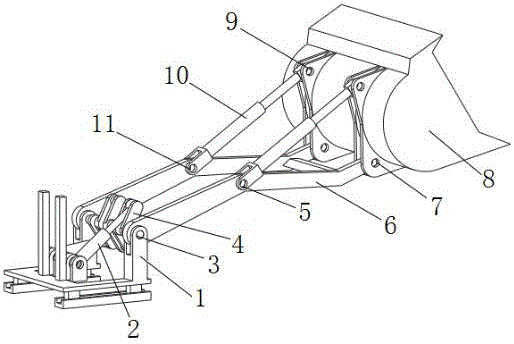
[0025] control figure 1 , the compact multi-unit linear drive sliding loading robot includes a multi-unit linear drive mechanism, a boom 6 , a first linear drive 10 , a second linear drive 14 , and a bucket 8 .
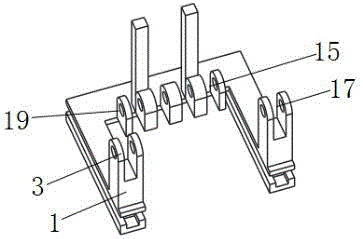
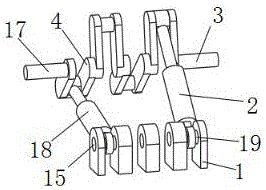
[0026] control figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , the multi-unit linear drive mechanism includes a frame 1, a third linear drive 2, a fourth linear drive 18, and a crankshaft 4. One end of the third linear drive 2 is connected to the frame 1 through a first rotating pair 19, and the other end One end of the fourth linear drive 18 is connected with the frame 1 through the third rotating pair 15, and the other end is connected with the crankshaft 4 through the fourth rotating pair 16. The crankshaft 4 passes The fifth revolving pair 17 and the sixth revolving pair 3 are connected with the frame 1 .
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More