

Robot image localization method and system based on deep learning
A deep learning and image positioning technology, which is applied in image analysis, image enhancement, image data processing, etc., can solve problems such as positioning failure, and achieve the effects of improving accuracy, extracting and matching features, and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
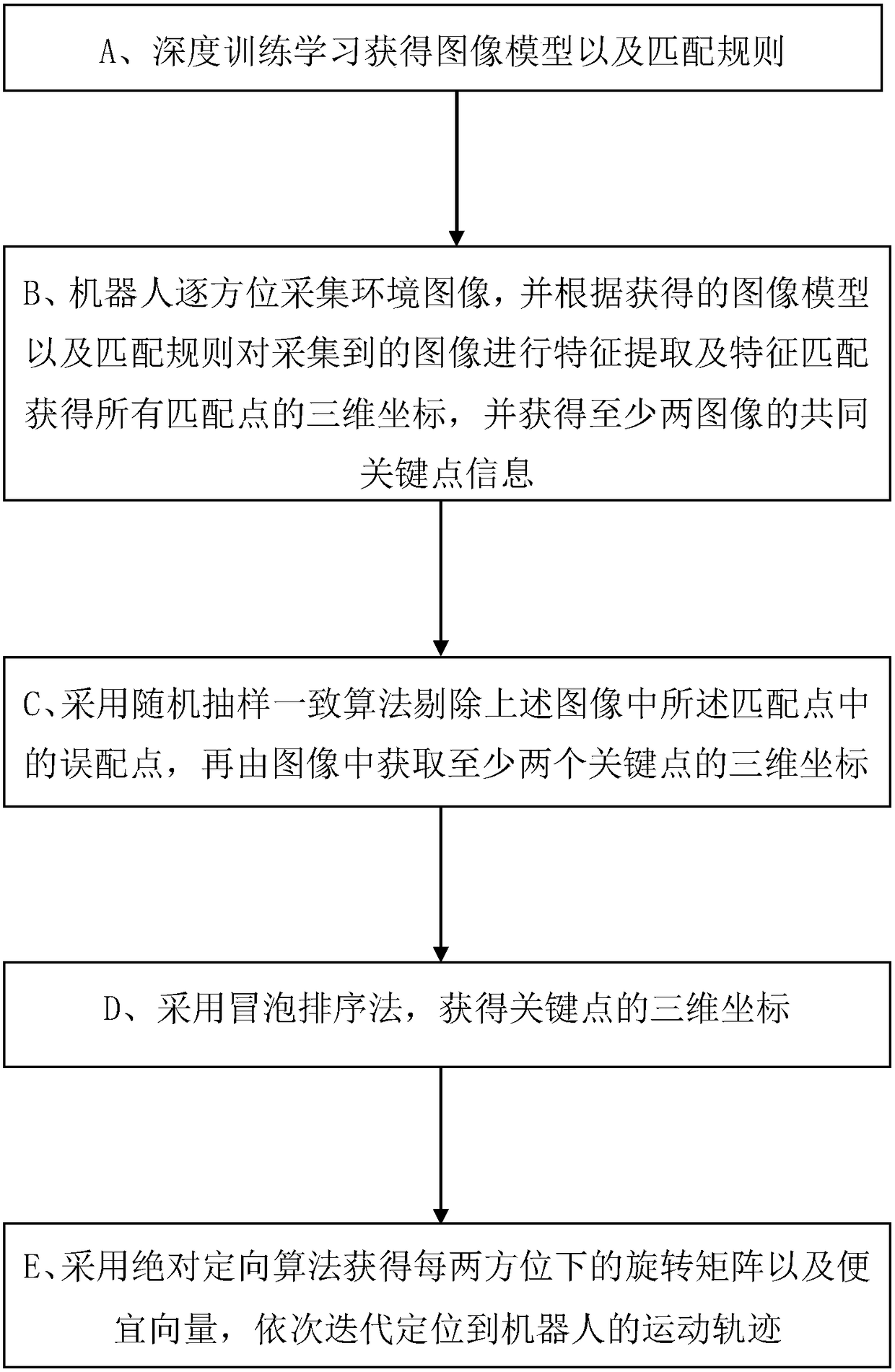
[0037] The technical solutions of the present invention will be further described below in conjunction with the embodiments and the accompanying drawings. Such as figure 1 Shown, be the flow chart of the robot image localization method based on deep learning of the present invention, mainly comprise the following steps in the present invention:
[0038] A. In-depth training and learning to obtain image models and matching rules;
[0039] B. The robot collects environmental images in azimuth, and performs feature extraction and feature matching on the collected images according to the obtained image model and matching rules to obtain the three-dimensional coordinates of all matching points, and obtain the common key point information of at least two images;
[0040] C. Use a random sampling consensus algorithm to eliminate the mismatched points in the matching points in the above image, and then obtain the three-dimensional coordinates of at least two key points from the image...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More