

Light active and passive combined lower-limb power-assisted exoskeleton robot
An exoskeleton robot, active and passive technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of large energy consumption of human body energy, limited range of motion, low energy utilization rate, etc., to achieve light weight and increase structure The effect of compactness and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
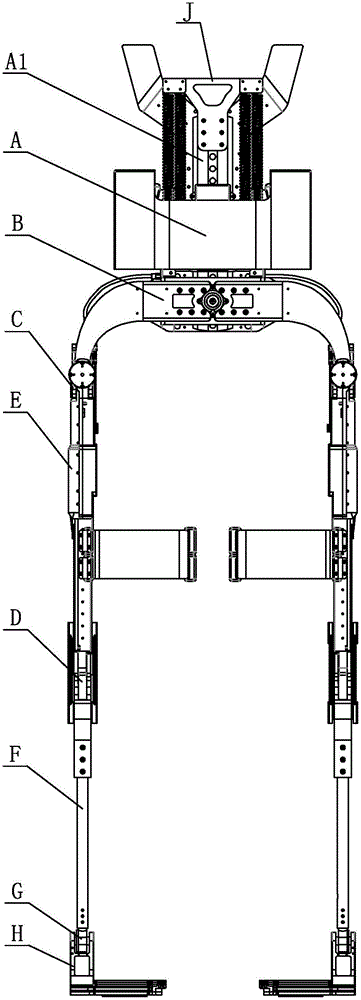
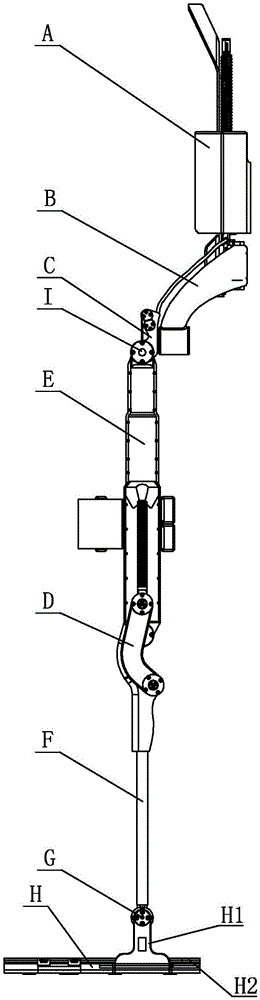
[0026] Specific implementation mode one: combine Figure 1 to Figure 8 Describe this embodiment, this embodiment includes back A, waist B, spring adjustment plate J, two hip joints C, two knee joints D, two thighs E, two calves F, two foot joint bearings G, Two feet H, two legs hip connection axis I, two knee joint connection axes K and two legging plastic plates L;
[0027] Each hip joint C includes hip joint rotating shaft seat C1, upper pulley shaft C2, lower pulley shaft C3, upper pulley C4, lower pulley C5, steel wire C6, guide pulley C7, steel wire fixing piece C8, guide pulley seat C9, spring lower pressure plate C10 1. A set of balance springs C11 and spring upper pressure plate C12. The hip joint shaft seat C1 includes the hip joint shaft C1-1 and two connecting plates C1-2. Two pulley shaft holes C1 are arranged above each connecting plate C1-2. -2-1, there is a leg hip connection shaft hole C1-2-2 under each connecting plate C1-2, the two connecting plates C1-2 are...
specific Embodiment approach 2
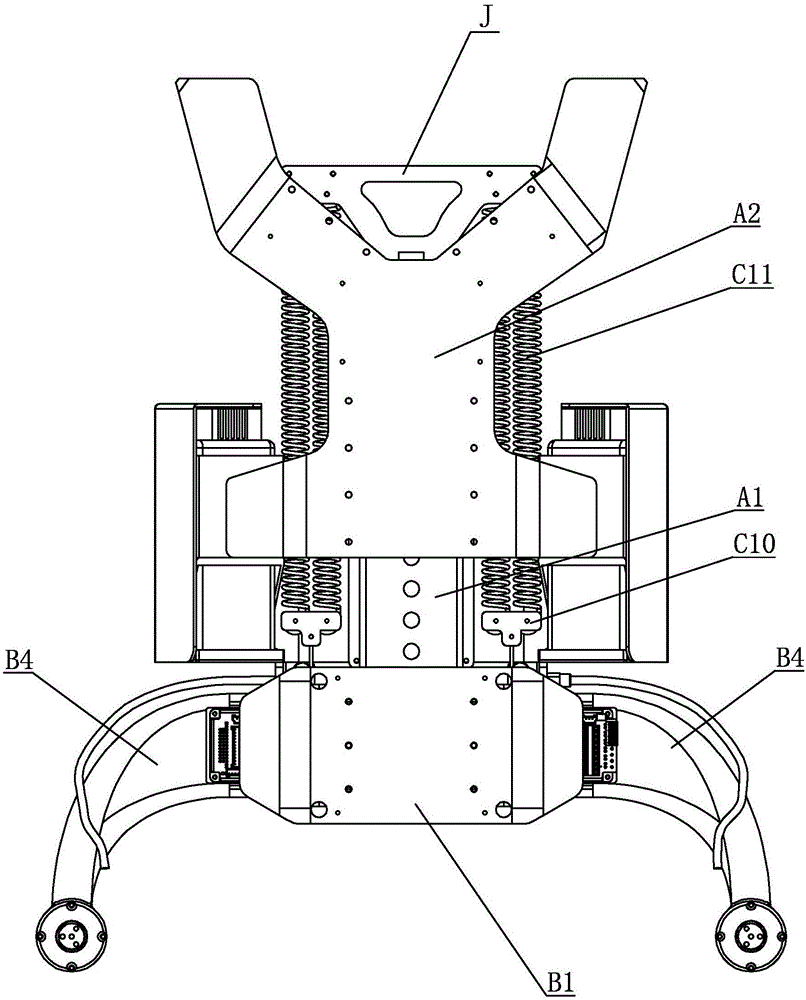
[0032] Specific implementation mode two: combination image 3 and Figure 4 To illustrate this embodiment, the back A of this embodiment includes a back support A1 and a back binding connector A2, the back binding connector A2 and the back support A1 are arranged front and back, and the back binding connection A2 and the back support A1 are connected through a connecting element , and the height of the back binding connector A2 can be adjusted through the connection positions of the multiple vertical connection element mounting holes on the back support member A1, so as to adapt to wearers of different heights. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0033] Specific implementation mode three: combination Figure 4 The present embodiment will be described. The number of a set of balance springs C11 in this embodiment is two, and the two balance springs C11 are arranged in parallel. The two balance springs C11 are connected in parallel to balance the gravitational potential energy of the lower extremity of the exoskeleton on one side. The spring adjustment plate J changes the hanging point of the balance spring C11 by adjusting the installation position of the back support A1, so as to change the elongation, original length and stiffness of the balance spring C11, thereby achieving , can also achieve the effect of balancing the elastic potential energy of the spring and the gravitational potential energy of the exoskeleton. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More