

Autonomous vehicle following system and control method for minimum safety vehicle interval of autonomous vehicle following system
A control method and the technology of the main control unit, applied in the field of smart vehicles, can solve the problems of increased risk of collision, inability to accurately estimate, and reduced safety distance, so as to overcome hysteresis and failure, ensure stability and robustness, The effect of accurate safety distance estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
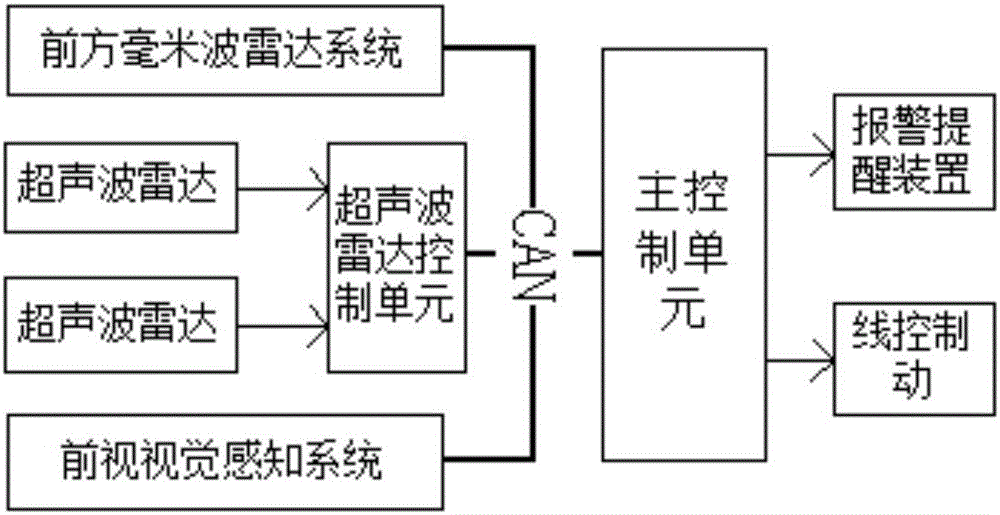
[0031] Such as figure 1 As shown, the system includes a millimeter-wave radar for collision avoidance; a front ultrasonic radar sensor; a front target and environment perception camera; bus composition. The forward collision avoidance millimeter-wave radar is used to detect the relative distance, speed and azimuth angle of moving and stationary targets in real time, further judge whether the vehicle is dangerous to go straight and the degree of danger, and whether to collect early warning or brake intervention.
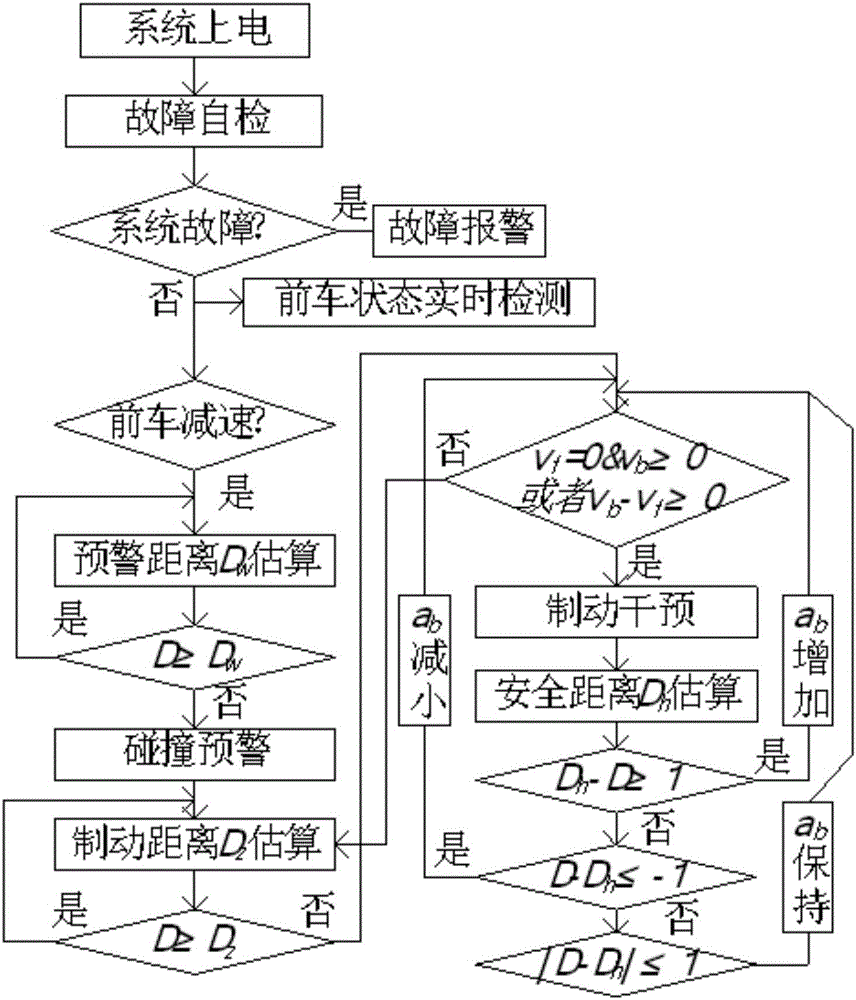
[0032] Two low-cost ultrasonic sensors are installed in front of the vehicle to cooperate with the forward-looking radar and the forward-looking camera to perceive the road environment ahead. At the same time, based on the existing safety distance model, a safety warning distance estimation model and a braking intervention distance are proposed. The estimation model and the closed-loop control model of the minimum safe vehicle distance after braking intervention enab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More