Four-wheeled independent steering and independent drive vehicle control system based on instinct driving idea
A vehicle control system, four-wheel independent steering technology, applied in electric vehicles, control drives, control devices, etc., can solve the problems of inability to drive vehicles, waste of four-wheel steering angle advantages, poor steering characteristics, etc., to increase the degree of freedom of movement Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
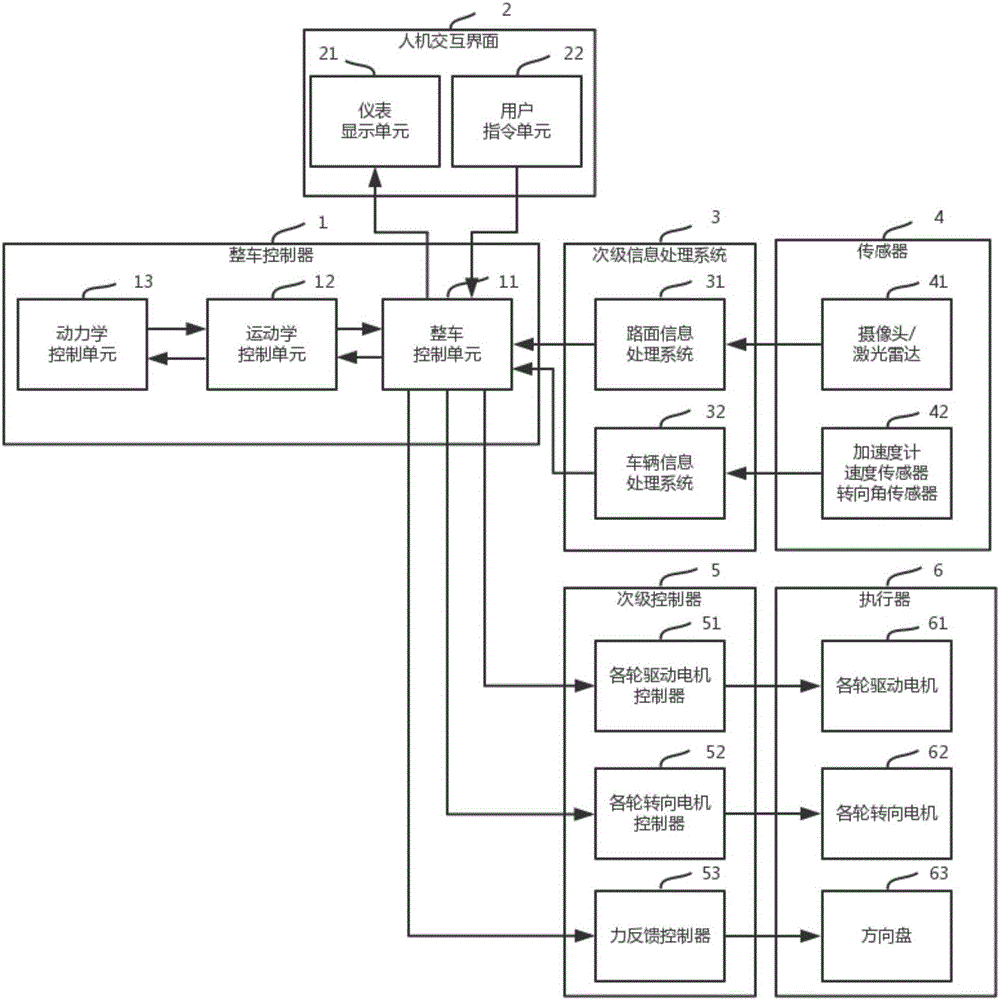
[0011] The four-wheel independent steering independent drive vehicle control system based on the concept of intuitive driving provided by the present invention is described in detail in conjunction with the accompanying drawings as follows:
[0012] The four-wheel independent steering independent drive vehicle control system based on the intuitive driving concept of the present invention needs to be applied to four-wheel independently steerable four-wheel motor independent drive vehicles. The characteristic of this type of vehicle is that each wheel can continuously degree steering, the steering angle of each wheel can be changed arbitrarily.
[0013] The structural composition of the vehicle control system of the present invention is as follows: figure 1 As shown, it includes a vehicle controller 1 composed of a vehicle control unit 11, a kinematics control unit 12 and a dynamics control unit 13, a human-machine interface 2 composed of an instrument display unit 21 and a user...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More