

Ceramic tile grabbing mechanism and mechanical arm for firmly grabbing ceramic tiles
A grasping mechanism and ceramic tile technology, applied in the direction of manipulators, program-controlled manipulators, conveyor objects, etc., can solve the problems of low running speed of manipulators, excessive transmission distance, collisions, etc., to avoid weak gripping and large contact area. , The effect of high transmission precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] Figure 1~14 It is the best embodiment of the present invention, below in conjunction with attached Figure 1~14 The present invention will be further described.
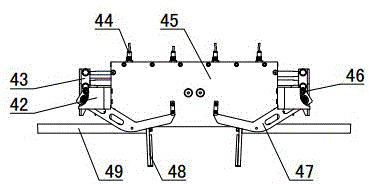
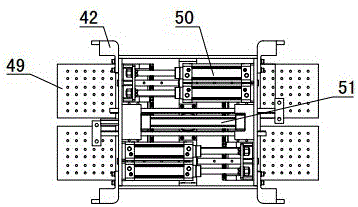
[0048] A tile grabbing mechanism: including a splint power unit and a tile splint 48, the splint power unit is installed in the grabbing mechanism main body 45, the tile splint 48 is arranged below the grabbing mechanism main body 45, and the splint power unit is connected to the tile splint 48;
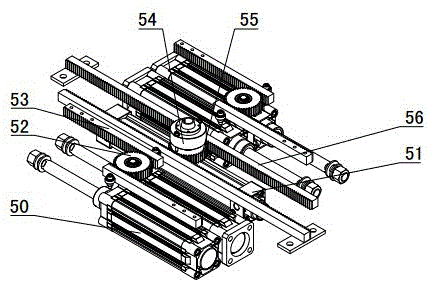
[0049] A splint drive mechanism is arranged between the splint power unit and the tile splint 48, and the splint drive mechanism drives the tile splint 48 to clamp or loosen the tiles through the rack and pinion pairs.
[0050] The tile grabbing mechanism clamps the tiles through the tile splint 48. The tile splint 48 has a large contact area with the tiles. The splint 48 can exert a greater clamping force to clamp the ceramic tile firmly to ensure that the tile will not fall off freely; When opening or clamping ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More