

Portable human joint parameter estimation method based on IMU (inertial measurement unit)
A technology for estimating human joints and parameters, applied in medical science, sensors, diagnostic recording/measurement, etc., can solve the problems of inconvenient operation, high price, and long time consumption, and achieve low price, short time consumption, small and portable device Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0033] Specific implementation mode one: as Figure 4 As shown, the IMU-based portable human joint parameter estimation method includes the following steps:
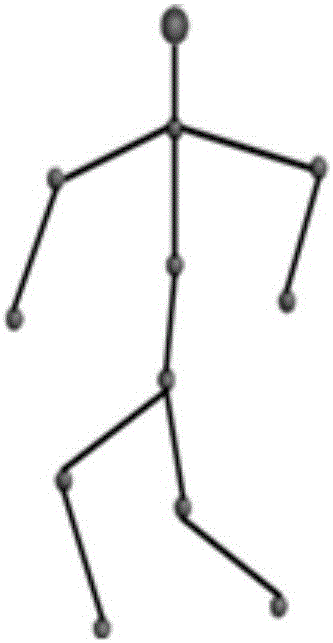
[0034] Ignore the translational motion of human joints, only consider their rotation. The human body can usually be regarded as a multi-rigid body structure articulated by flexion joints and ball joints. By wearing the IMU sensor module on each limb, and then combining with the sensor fusion algorithm, the orientation, linear acceleration and angular rate information of the limb can be obtained. Then calculate the human body joint parameter information. Simplified human skeleton model such as image 3 shown.
[0035] Step 1: The human arm is equivalent to three rigid bodies of the upper arm, forearm and palm hinged through the elbow joint and wrist joint, and the coordinate system is defined;
[0036] Step 2: According to Step 1, pass o through human kinematics analysis 1 exist The position vector of The second...
specific Embodiment approach 2
[0047] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that the coordinate system defined in the step 1 is specifically:
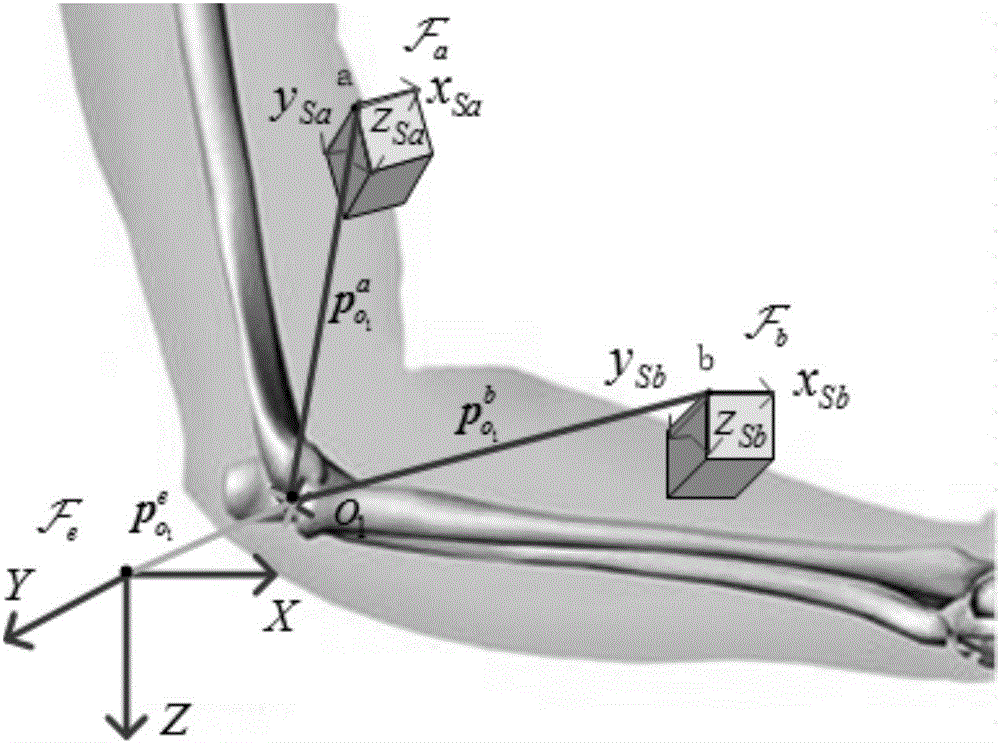
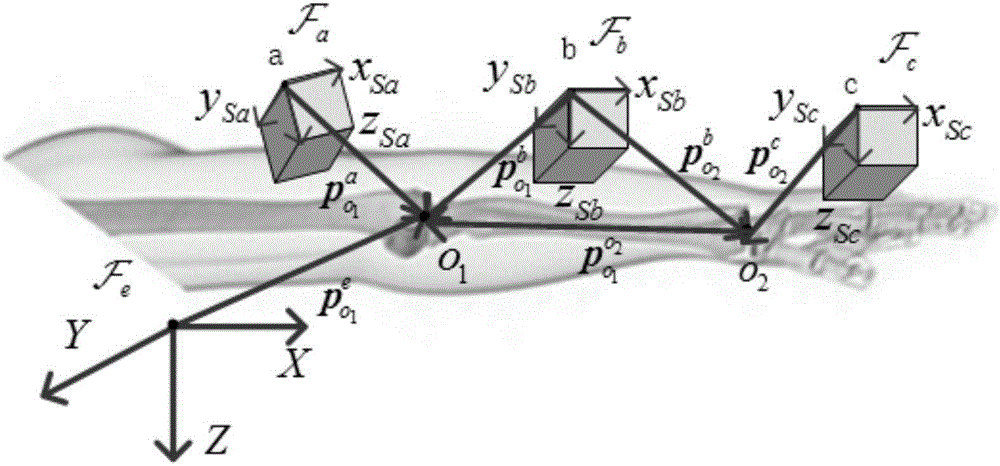
[0048] Use A, B, and C to represent the upper arm, forearm, and palm, respectively, such as figure 1 As shown, define o 1 , o 2 It is the rotation center of the elbow joint and wrist joint; install the IMU sensor on the upper arm, forearm and palm in any direction, and establish the upper arm sensor coordinate system on the upper arm, forearm and palm IMU sensors respectively Forearm sensor coordinate system and palm sensor coordinate system a, b, c are the origins of their corresponding coordinate systems, is a fixed reference frame. The IMU sensor can be installed anywhere on the upper arm, forearm, and palm, respectively.
[0049] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0050] Specific implementation mode three: the difference between this implementation mode and specific implementation mode one or two is: said step two obtains The second order differential form of Specifically:
[0051] Through the analysis of human kinematics:
[0052] p ·· o 1 e = R e a ( a a a + ( ω ^ e a a ω ^ e a a + ω · ^ e a a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More