

Lane keeping system and method based on Beidou high-precision positioning
A lane keeping and high-precision technology, applied in the field of Beidou positioning, can solve the problems of large amount of calculation data processing, low reliability, and difficulty in adapting control parameters to changes in road curvature, and achieve the effect of strong privacy and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
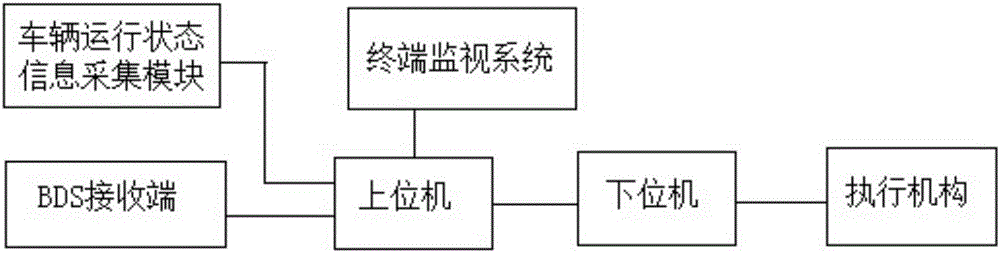
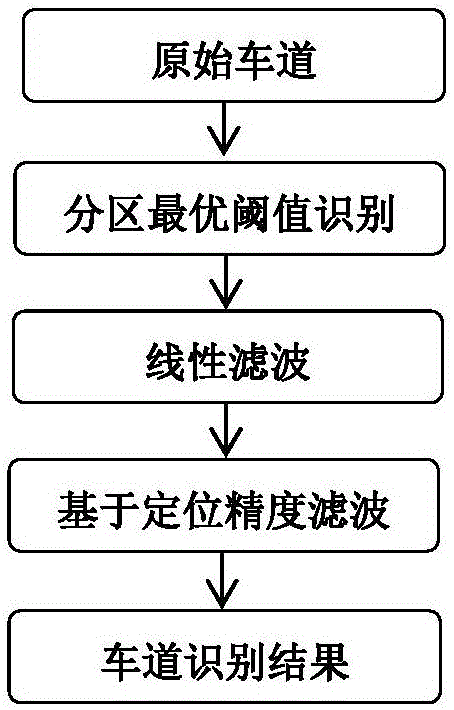
[0026] The present invention provides a lane keeping system based on Beidou high-precision positioning, such as figure 1 As shown, it includes a vehicle running state information collection module, a BDS receiver, a host computer control system, a lower computer control system, and a terminal monitoring system; the vehicle running state information collection module is used to obtain parameters of the vehicle running state from the vehicle; the BDS The receiving end is used to receive the location information, map and road information of the vehicle from the Beidou satellite; the upper computer control system is used to obtain the parameters of the vehicle running state, the location information of the vehicle, the map and road information through the CAN bus, and pass the regional threshold Binarization, linear filtering and lane image width filterin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More