

A boarding bridge device for vehicle-mounted remote control non-road walking equipment
A technology of walking equipment and boarding bridge, which is applied in the field of loading and unloading and transportation of special equipment, can solve the problems of falling damage, long length of boarding bridge, self-heaviness, etc., and achieve the goals of preventing damage from falling, reducing the number and improving the supporting strength Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
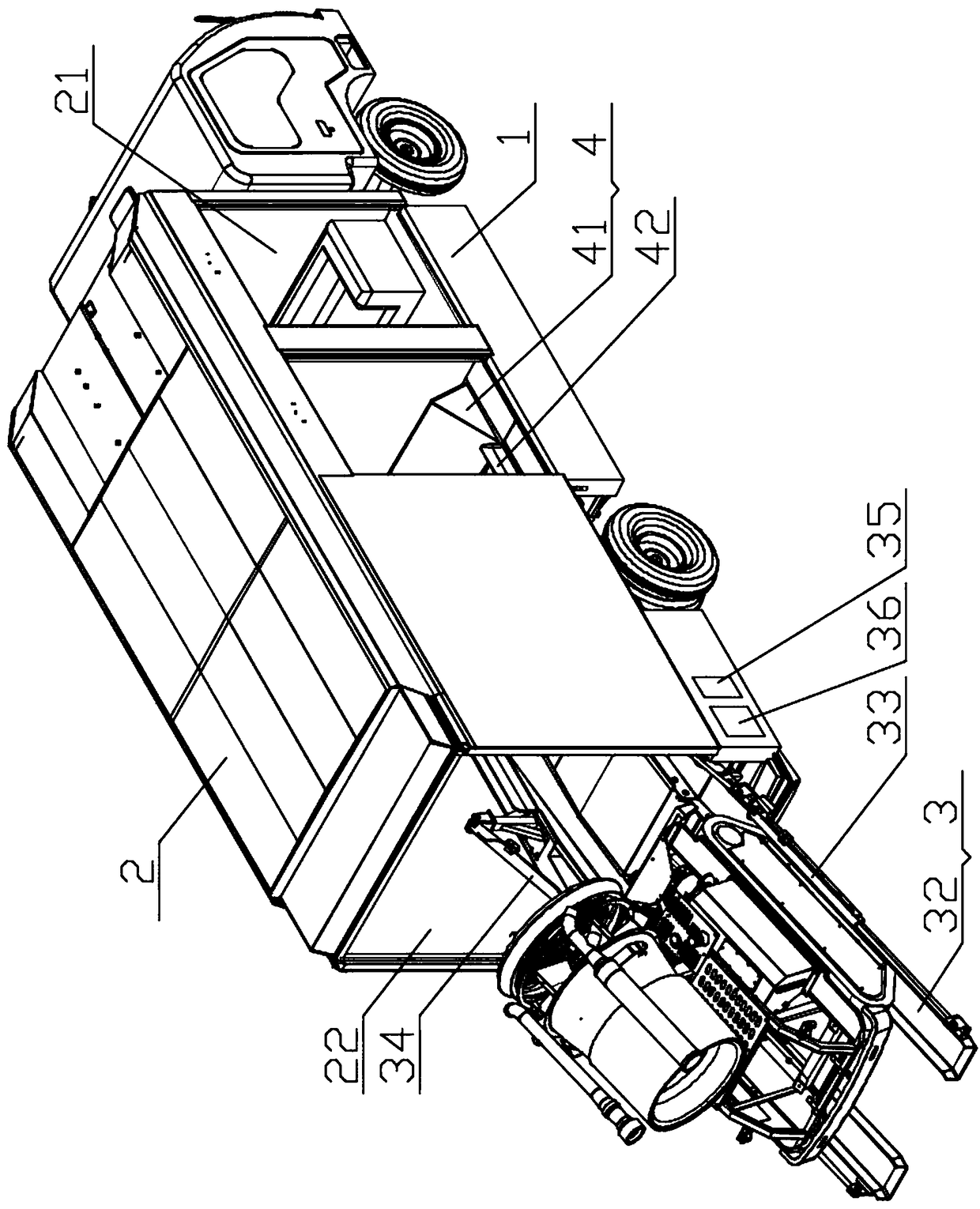
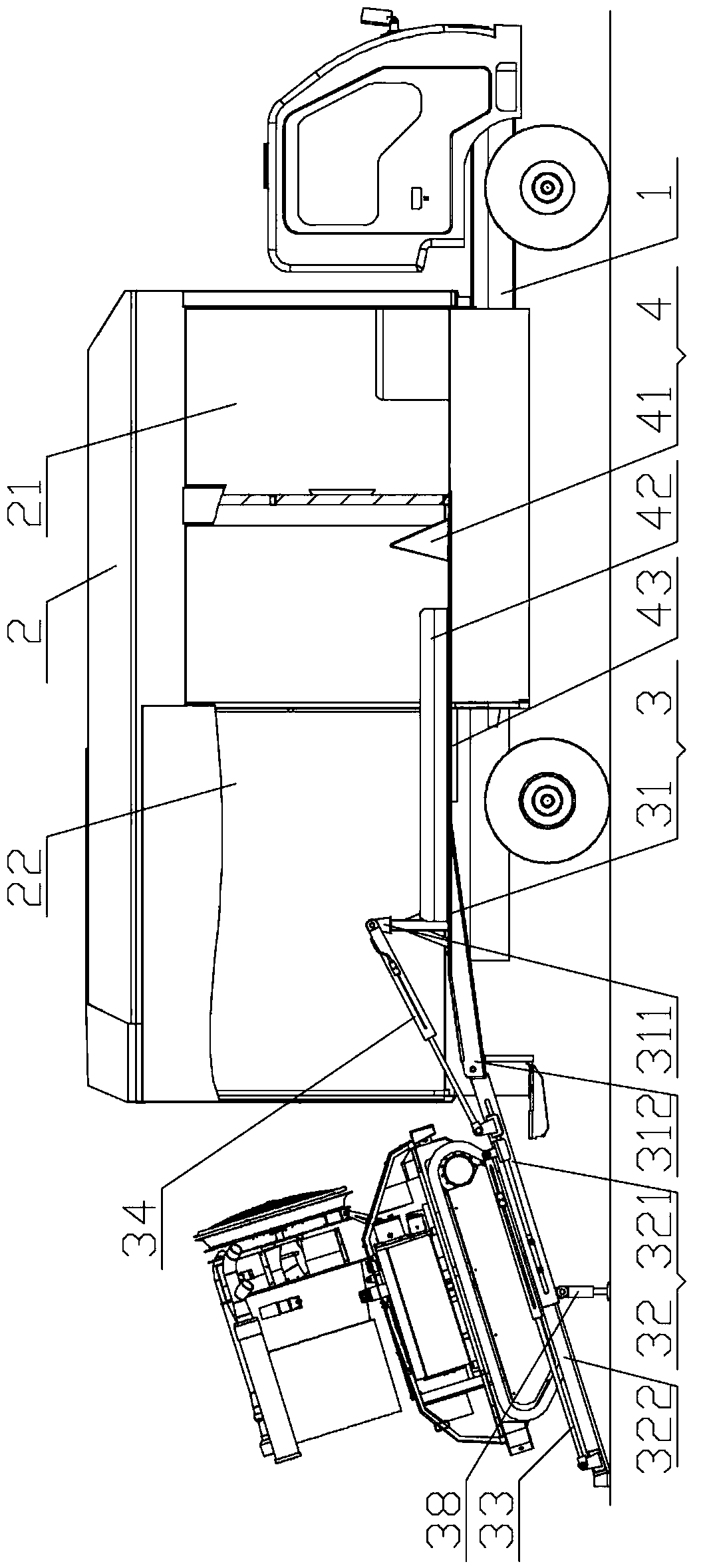
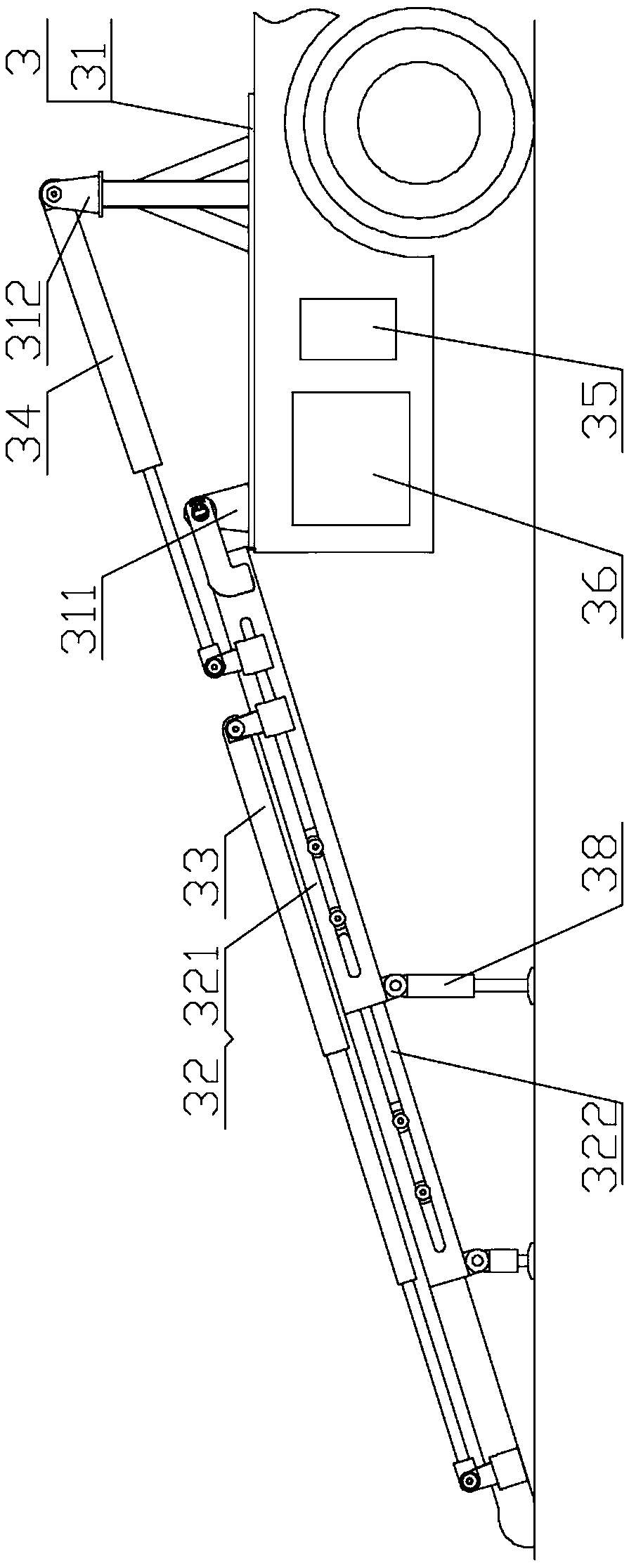
[0024] Take the fire-fighting robot and the fire-fighting command comprehensive operation vehicle as example below, and the state that the boarding bridge device of this vehicle-mounted remote control non-road surface walking equipment is fully expanded in conjunction with the accompanying drawings will further illustrate the present invention (the normal driving of the fire-fighting command comprehensive operation vehicle below) directions are described above).
[0025] Such as figure 1 , figure 2 As shown, the integrated fire control operation vehicle includes a car body chassis 1, a compartment 2, a boarding bridge device 3 and a fire robot positioning device assembly 4.
[0026] The compartment 2 is a closed structure comprising a compartment floor, the front portion of the compartment 2 is provided with a fire-fighting robot command room 21, and the fire-fighting robot command room 21 is provided with a fire-fighting robot monitoring system including a monitoring screen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More