

RGB-D and SLAM scene reconfiguration method based on FAST and FREAK feature matching algorithm
A scene reconstruction and feature matching technology, applied in the field of RGB-D and SLAM scene reconstruction, can solve the problem that the relative transformation matrix does not meet the theoretical constraints of the unit matrix, and achieve the effect of reducing the number of splicing and reducing the accumulation of errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings.
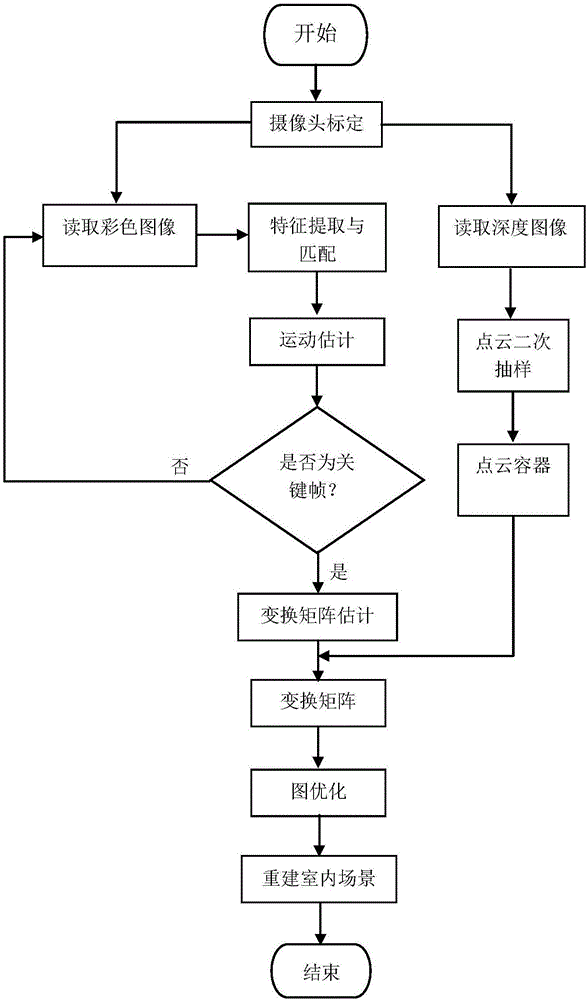
[0032] Traditional RGB-D SLAM uses feature matching algorithms such as SIFT, SURF, and ORB. In terms of real-time performance, algorithms such as SIFT and SURF are not ideal. ORB and FREAK algorithms are proposed for running on mobile devices, so real-time In terms of robustness, the comprehensive performance of SIFT is good, the performance of SURF is poor when the illumination changes, and the performance is relatively stable under other conditions, the comprehensive performance of ORB algorithm is average, and the performance of FREAK algorithm is relatively good in various environments. good stability. Considering both real-time and robustness of the method, a RGB-D SLAM scene reconstruction method based on FAST and FREAK feature matching algorithms is proposed.
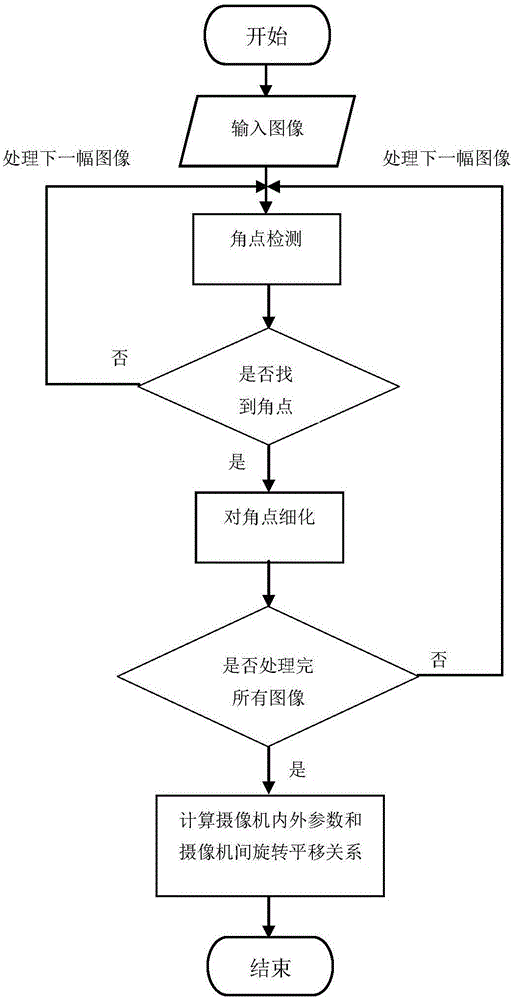
[0033] (1) First, calibrate the Kinect device. The present invention adopts the calibration function...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More