

Autonomous mobile robot communication system based on CAN bus
A CAN bus, autonomous mobile technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as expensive, complex, poor signal processing and computing power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
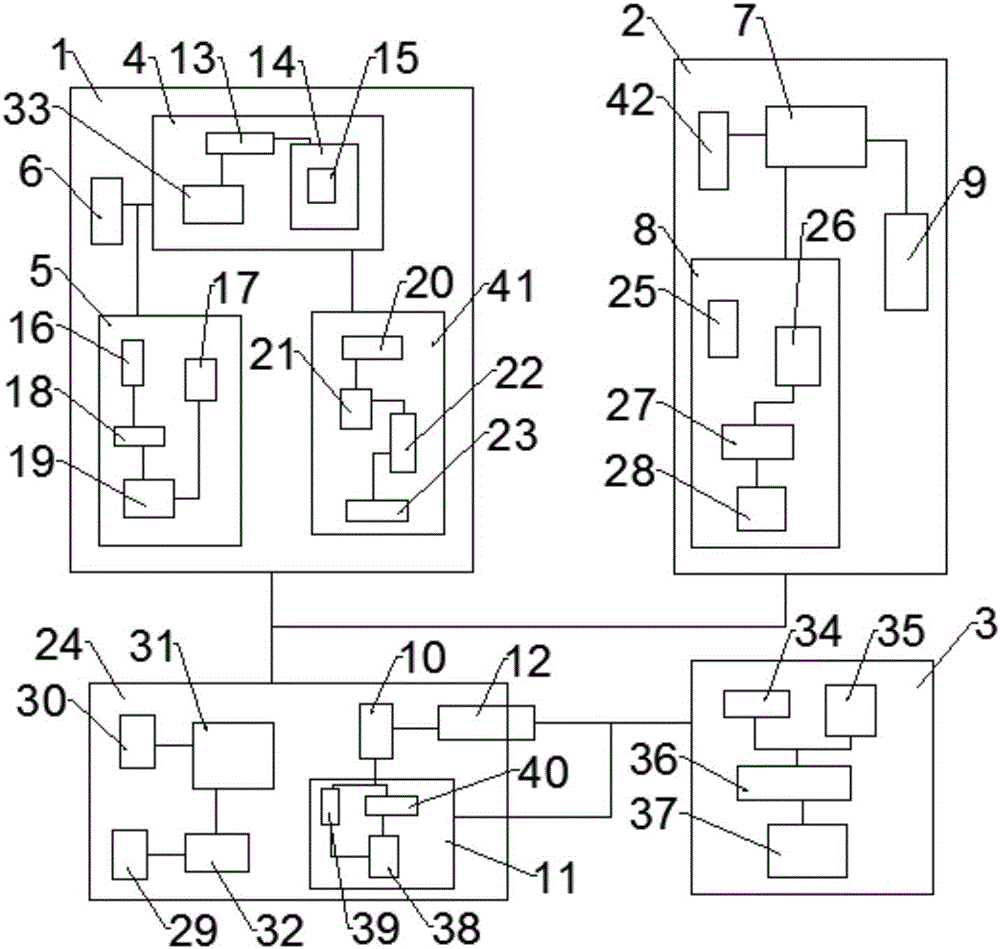
[0018] see figure 1 and figure 2 , the present invention provides a technical solution: an autonomous mobile robot communication system based on CAN bus, including a human-computer interaction unit 1 and a CAN bus control unit 2, and the data link between the human-computer interaction unit 1 and the CAN bus control unit 2 The DSP control system 3 is connected with the FPGA controller 24 between the roads, and the human-computer interaction unit 1 includes a wireless local area network interface 4, and the wireless local area network interface 4 includes a transceiver antenna 13, and the data end of the transceiver antenna 13 is connected to There is a network signal detector 14, and the inside of the network signal detector 14 is also provided with a signal encryption module 15, the output end of the transceiver antenna 13 is also connected with a digital-to-analog converter 33, and the data end of the wireless local area network interface 4 Be connected with wireless commu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More