

Intelligent car control system applicable to control of mobile terminal equipment
An intelligent car and mobile terminal technology, applied in general control systems, control/regulation systems, program control, etc., can solve the problems of poor software real-time performance, inconvenience for users to expand and customize system software and hardware, poor scalability and openness, etc. To achieve the effect of stable and smooth operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
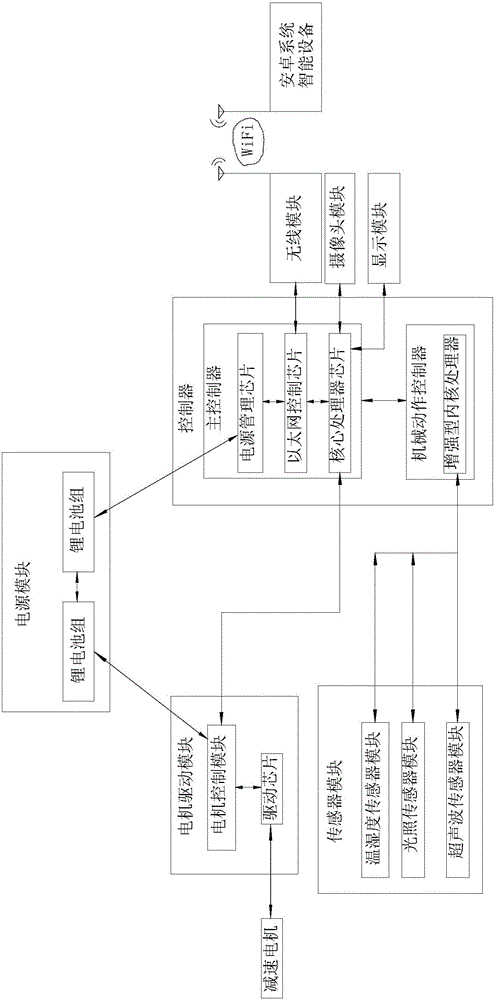
[0040] Such as figure 1As shown, a smart car control system suitable for mobile terminal equipment control, including a power supply module, a motor drive module, a controller, a sensor detection module, a wireless module, a display module, a camera module and an external storage device interface;
[0041] The power module includes two sets of lithium batteries, wherein one set of lithium batteries is connected to the power management chip of the controller, and the other set of lithium batteries is connected to the motor drive module;
[0042] Described motor drive module comprises motor control module and 2 identical drive chips, (wherein, drive chip selects L298 drive chip for use Figure 6 is the driving chip schematic diagram), the motor control module includes a main processor and a single-chip microcomputer, and the single-chip microcomputer, the main processor and 2 driving chips are connected in series in sequence; the driving chip is provided with a 4-channel logic c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More