

Robot autonomous navigation method and system based on vision positioning algorithm
A visual positioning and autonomous navigation technology, applied in control/adjustment systems, two-dimensional position/channel control, instruments, etc., can solve problems such as inability to change the robot's walking state, poor navigation effect, and inability to autonomously avoid obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
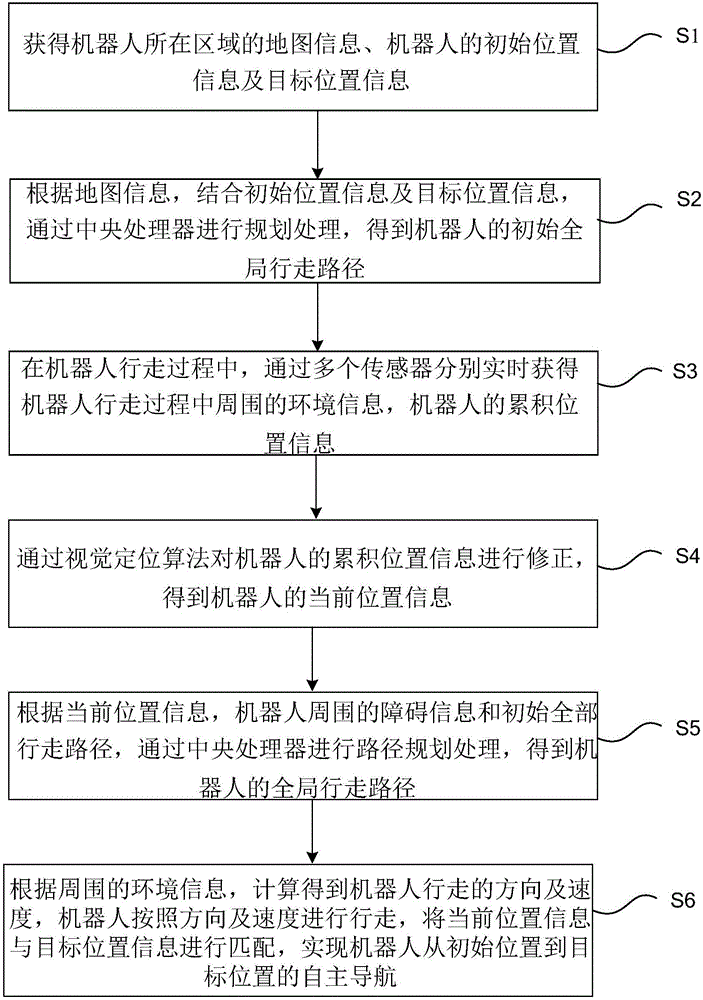
[0071] figure 1 It shows a flow chart of a robot autonomous navigation method based on visual positioning algorithm provided by the first embodiment of the present invention; figure 1 A method for autonomous navigation of a robot based on a visual positioning algorithm provided in Embodiment 1, including:
[0072] Step S1, obtaining the map information of the area where the robot is located, the initial position information of the robot and the target position information;
[0073] Step S2, according to the map information, combined with the initial position information and the target position information, the central processing unit performs planning processing to obtain the initial global walking path of the robot, and all the initial walking paths are used as the walking path of the robot;
[0074] Step S3, during the walking process of the robot, the surrounding environmental information during the walking process of the robot, the cumulative position information of the r...
Embodiment 2
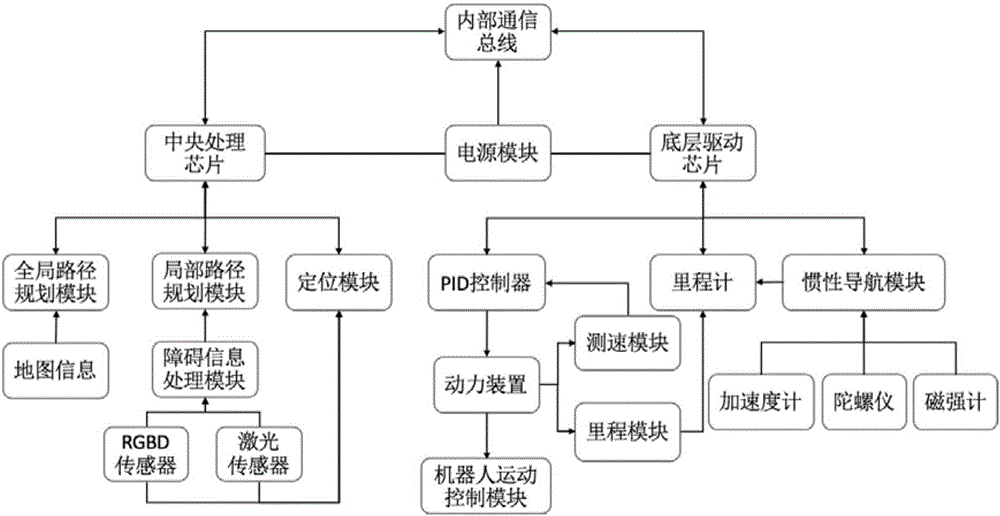
[0111] figure 2 A schematic diagram of a hardware system platform of a robot autonomous navigation method based on a visual positioning algorithm provided by the second embodiment of the present invention is shown. Such as figure 2 As shown, the whole system is mainly divided into three parts, including data acquisition device, data analysis platform and underlying control platform. The data acquisition device is composed of various sensors, including depth cameras, laser sensors, magnetometers, accelerometers, and gyroscopes. Various sensors store their data as data acquisition devices for use by processing chips. The data analysis platform is a central processing chip. The processing chip obtains the sensor information in the data acquisition device through the data bus, and then uses the navigation algorithm to calculate the best driving route of the current robot. The underlying control platform mainly includes chassis control chips, power devices, measuring component...
Embodiment 3
[0143] Figure 4 A schematic diagram of an autonomous navigation system for a robot based on a visual positioning algorithm provided by the second embodiment of the present invention is shown. Such as Figure 4 The autonomous navigation system 10 of a robot based on the visual positioning algorithm provided by the second illustrated embodiment includes:
[0144] The initialization module 101 is used to obtain the map information of the area where the robot is located, the initial position information and the target position information of the robot;
[0145] The initial global path module 102 is used for planning and processing through the central processing unit according to the map information, in combination with the initial position information and the target position information, to obtain the initial global walking path of the robot, and all the initial walking paths are used as the walking path of the robot;
[0146] The information acquisition module 103 is used to o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More