

Attitude control method and system based on quad-rotor unmanned helicopter
A quad-rotor UAV and attitude control technology, applied in the field of UAV, can solve the problems of poor robustness, difficult adjustment of the D parameters of the differential action term, and uncertainty of the system model.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
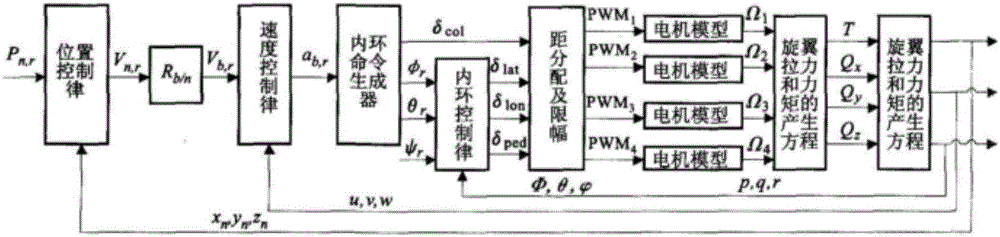
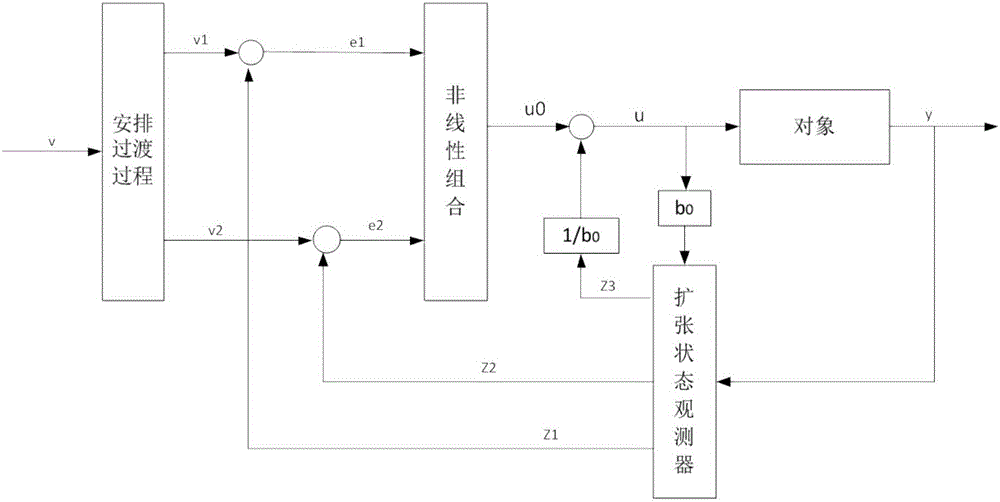
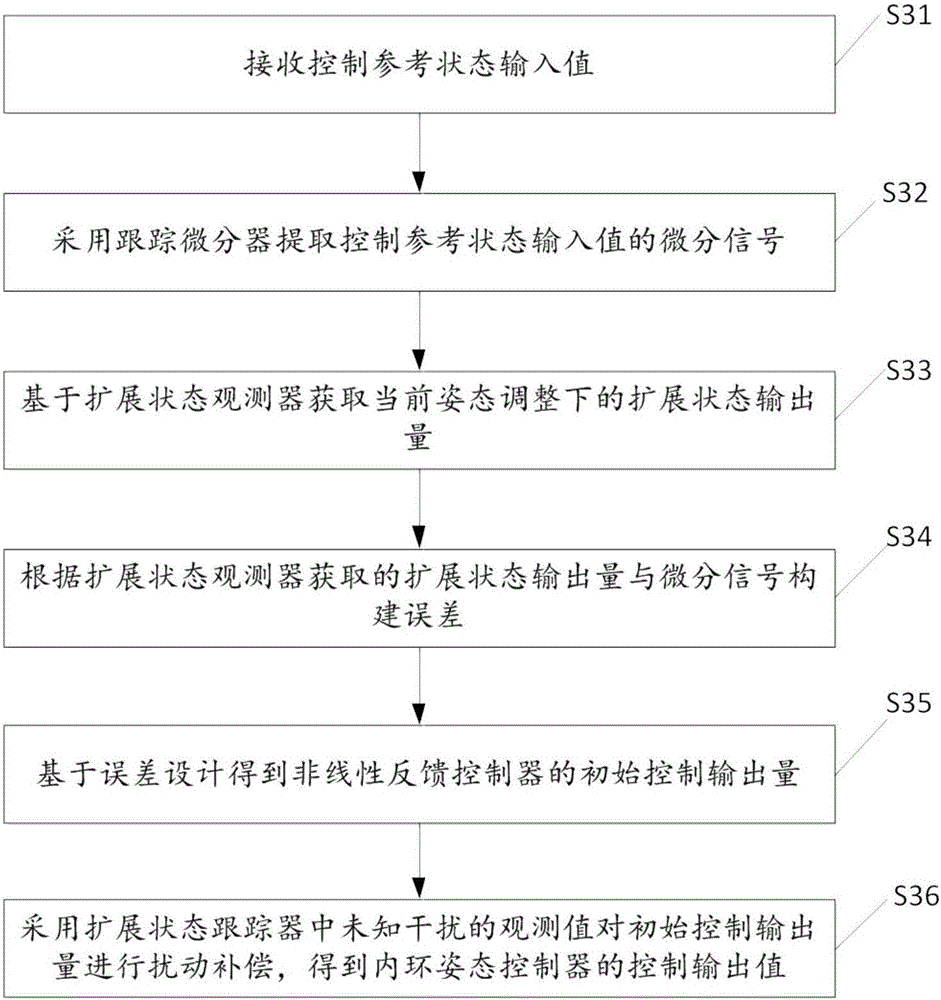
[0074] The method for attitude control based on the quadrotor UAV in the embodiment of the present invention adopts: receiving the control reference state input value; using the tracking differentiator to extract the differential signal of the control reference state input value; obtaining the current attitude based on the extended state observer The adjusted extended state output; according to the extended state output obtained by the extended state observer and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More