

Carrying cart controlled by Android smart phone
A technology for handling trolleys and smart phones, applied in the field of mobile robots, can solve the problems of inconvenient movement, inability of robots to adapt to different road environments, inflexible control, etc., and achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
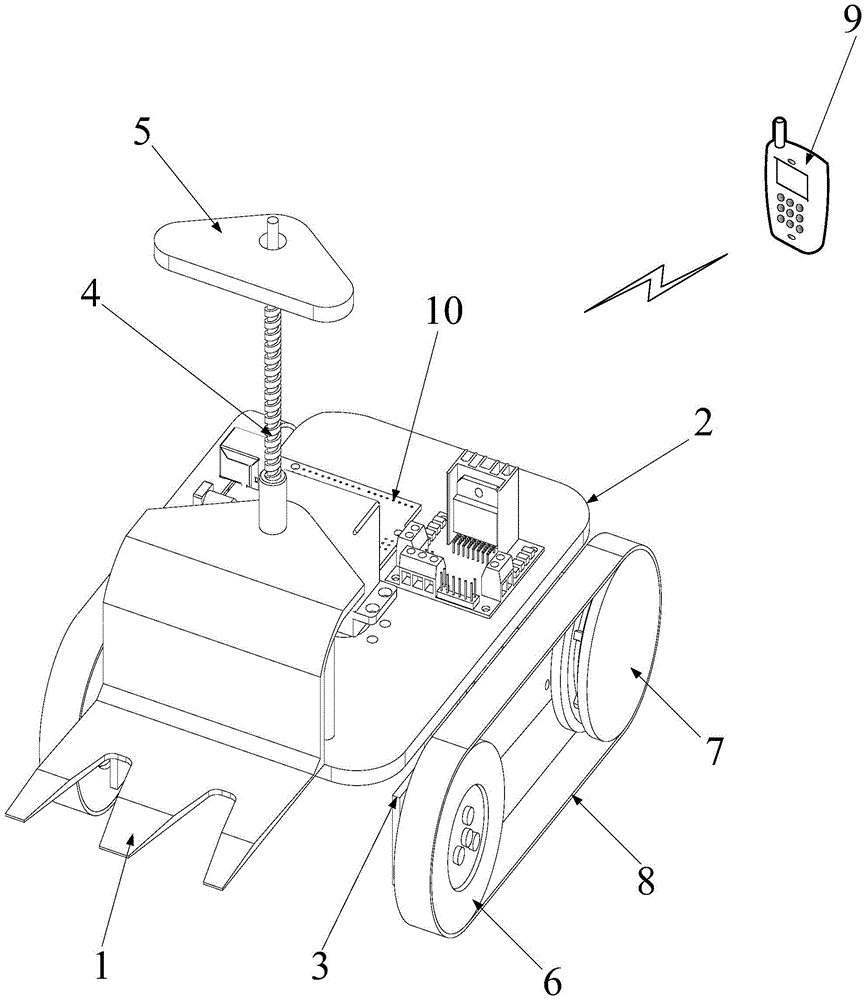
[0034] Such as figure 1 As shown, Embodiment 1 of the present invention provides a handling trolley controlled by an Android smart phone, the handling trolley includes a car body, a driving device and a lifting mechanism, and the driving device and the lifting mechanism are all installed on the car body , the driving device is used to drive the movement of the car body; the lifting mechanism is used to drive the lifting movement of the fork 1 .
[0035]The vehicle body includes a cargo fork 1, a vehicle plate 2 and a vehicle frame 3 symmetrically arranged on both sides of the vehicle plate 2, one end of the vehicle plate 2 is longitudinally connected to an optical axis 4, and the top end of the optical axis 4 passes through the The pallet fork 1 is connected to the mounting plate 5, and the pallet fork 1 is the executive mechanism of the car body, and the pallet fork 1 is connected with the lifting mechanism, and the lifting motion of the pallet fork 1 is completed under the d...
Embodiment 2
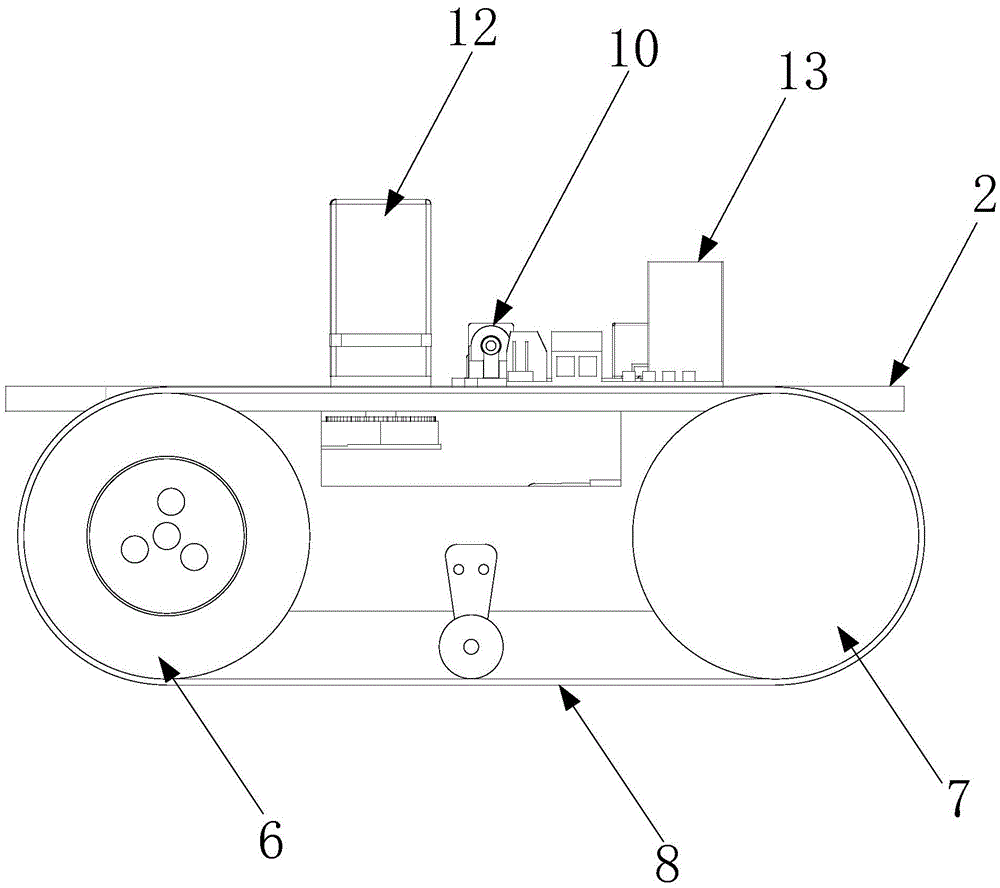
[0040] like image 3 and 4 As shown, Embodiment 2 of the present invention provides a handling trolley controlled by an Android smart phone. On the basis of Embodiment 1, this Embodiment 2 further defines the structure of the driving device and the fork 1, which improves the handling The versatility of the trolley.
[0041] like image 3 As shown, in order to further understand how the driving device drives the trolley to move on a plane or steps, it is defined in the technical solution that the driving device includes two rear wheels 7 for respectively driving the left and right sides. The driving motor 12 and the motor driving board 13 for controlling the opening / closing of the driving motor 12, the driving motor 12 and the motor driving board 13 are all arranged above the vehicle board 2, the driving motor 12 The output shaft is connected with the rear wheel 7 and drives the rear wheel 7 to rotate, and the motor driving board 13 is connected with the controller 10 .
[...
Embodiment 3
[0045] like Figure 5 and 6 As shown, Embodiment 3 of the present invention provides a transport trolley controlled by an Android smart phone. On the basis of Embodiment 2, Embodiment 3 further defines the lifting mechanism, which improves the versatility of the transport trolley.
[0046] like Figure 5 As shown, in order to enable the fork 1 to realize lifting movement, the optical axis 4 is defined as a lead screw in this technical solution, and a nut 14 adapted to it is passed through the lead screw, and the nut 14 of the nut 14 The bottom flange is fixedly connected with the flat plate 103 of the pallet fork 1 . The nut 14 drives the flat plate 103 to move up and down along the screw, and when the screw rotates, the fork 1 moves up and down, thereby completing the lifting action.
[0047] like Image 6 As shown, in order to drive the screw to realize rotation under the control of the controller 10, it is defined in the technical solution that the lifting mechanism inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More