

Unmanned aerial vehicle airborne LiDAR point cloud filtering method based on adaptive gradient
A self-adaptive, gradient technology, applied in computer parts, image data processing, instruments, etc., to achieve the effect of improving search efficiency and improving operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
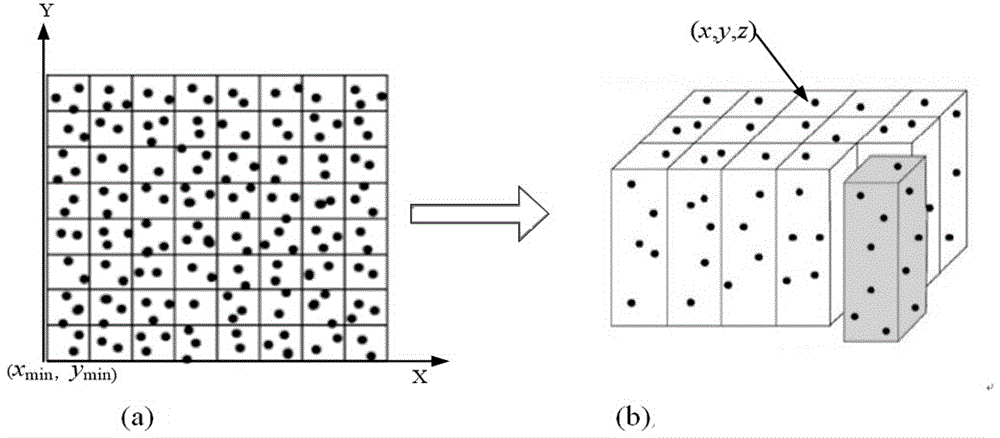
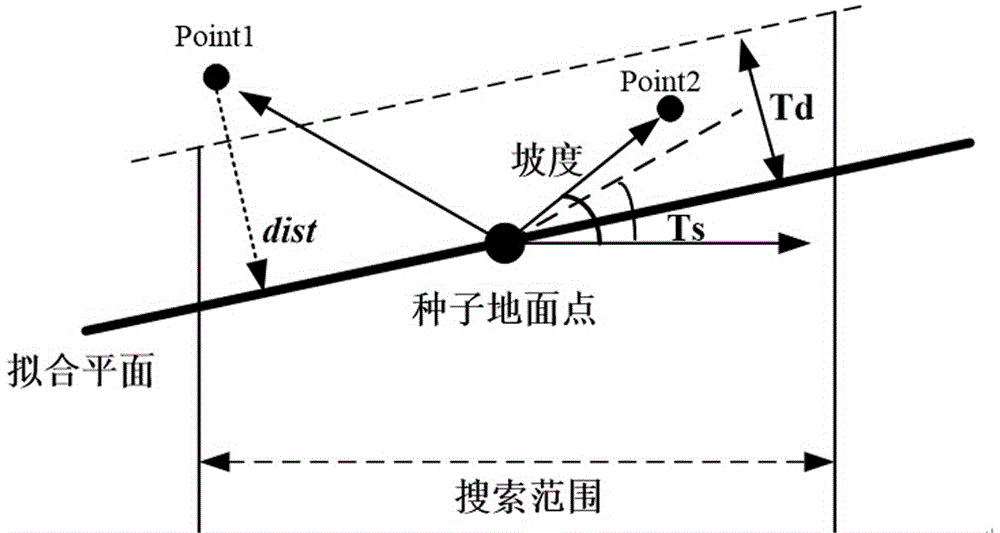
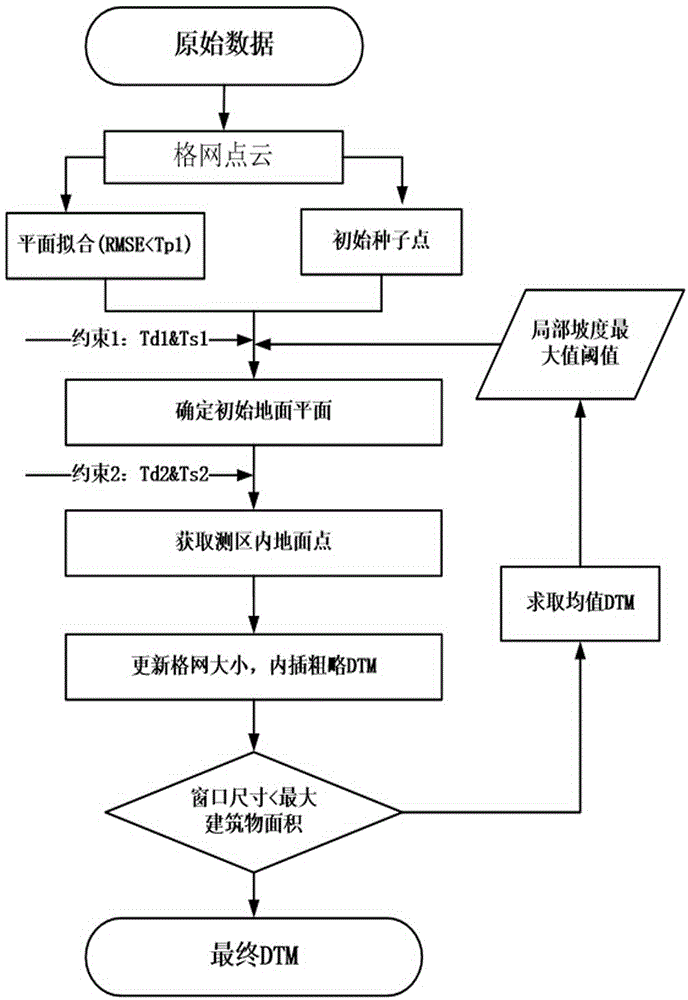
[0028] The invention proposes an adaptive gradient filtering algorithm suitable for urban classification by referring to the basic principle based on gradient filtering and fully considering point cloud data organization forms and surface forms. The slope-based filtering algorithm was first proposed by Vosselman to determine the optimal filtering function by comparing the elevation changes between two adjacent points. For a given height difference threshold Δh max (d), the decreasing distance between two points directly reduces the possibility that the laser point with a large elevation value belongs to the ground. The reason for analyzing the sudden change in elevation between two adjacent points may be that the two laser points are respectively located on the ground, vegetation, or houses, so it is based on comparing the height dif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More