

Bituminous mixture loading system based on machine vision and control method
A kind of asphalt mixture and machine vision technology, applied in the field of asphalt mixture loading system and control based on machine vision, can solve the problem of affecting the homogeneity and service strength of the road surface, the unreliable detection results of the depth of the carriage, and the low control reliability. problems, to achieve the effect of reducing segregation in loading, improving construction quality and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
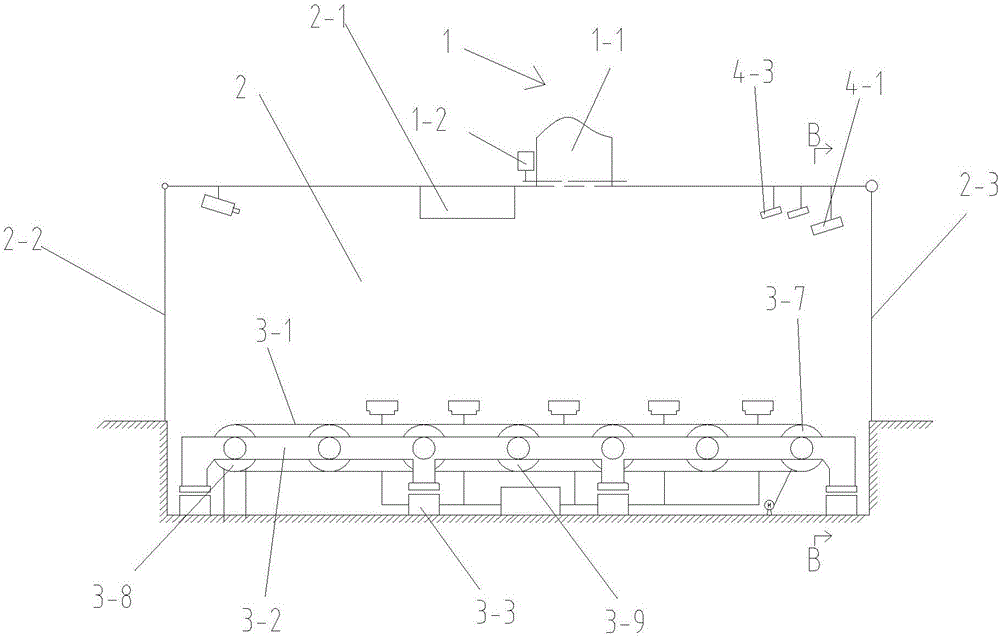
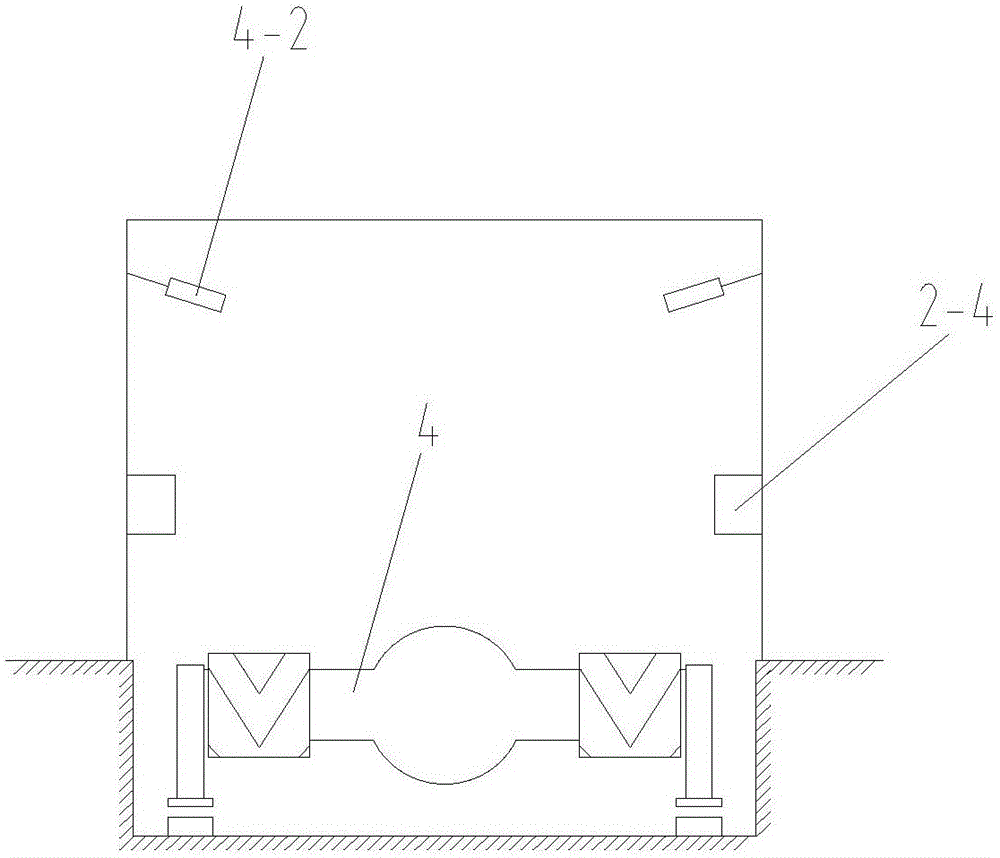
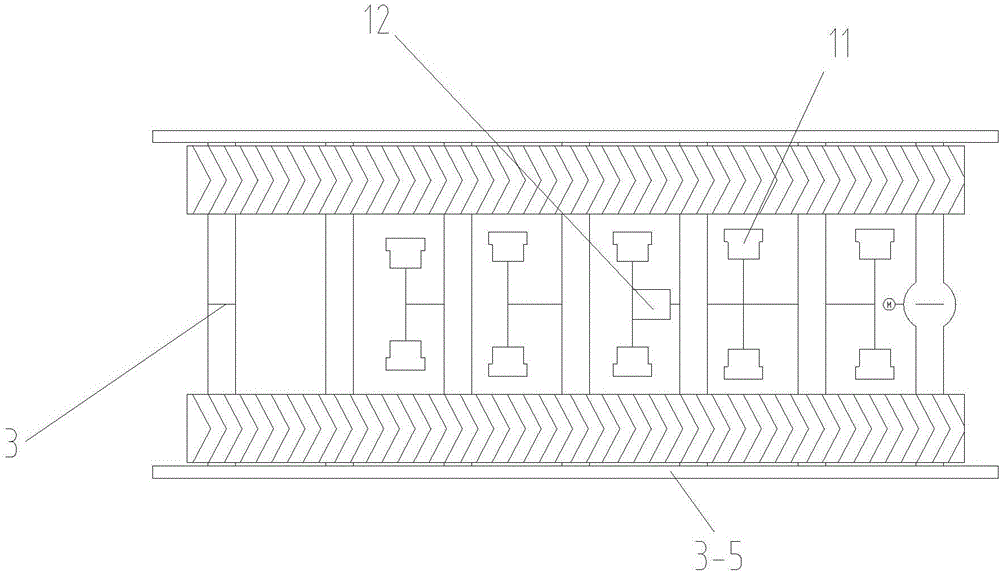
[0054] Such as figure 1 , figure 2 , image 3 and Figure 4 The shown a kind of asphalt mixture loading system based on machine vision includes a box-type loading room 2, a material door mechanism 1 arranged on the top of the box-type loading room 2, a The vehicle mobile platform 3 arranged horizontally and the machine vision control system for controlling the asphalt mixture loading process, the material gate mechanism 1 includes a gate 1-1 for controlling the flow rate of the asphalt mixture and the opening degree of the gate 1-1 A linear displacement sensor 1-2 for real-time detection, the vehicle mobile platform 3 includes a crawler flat 3-1 for the charging vehicle to park, a longitudinal beam support 3-2 arranged at the bottom of the crawler flat 3-1, and a crawler flat 3 -1 The roller mechanism that is connected by transmission and drives the track plate 3-1 to move back and forth in the horizontal direction, and the roller drive mechanism that drives the roller mec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More