

High-precision rapid filtering and smoothing algorithm of GNSS/SINS tight combination
A technology with smooth filtering and fast algorithm, which is applied to navigation through velocity/acceleration measurement, radio wave measurement systems, instruments, etc. It can solve the problems of time-consuming state forecast update, consumption of hardware resources, and inability to effectively improve the accuracy of navigation parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
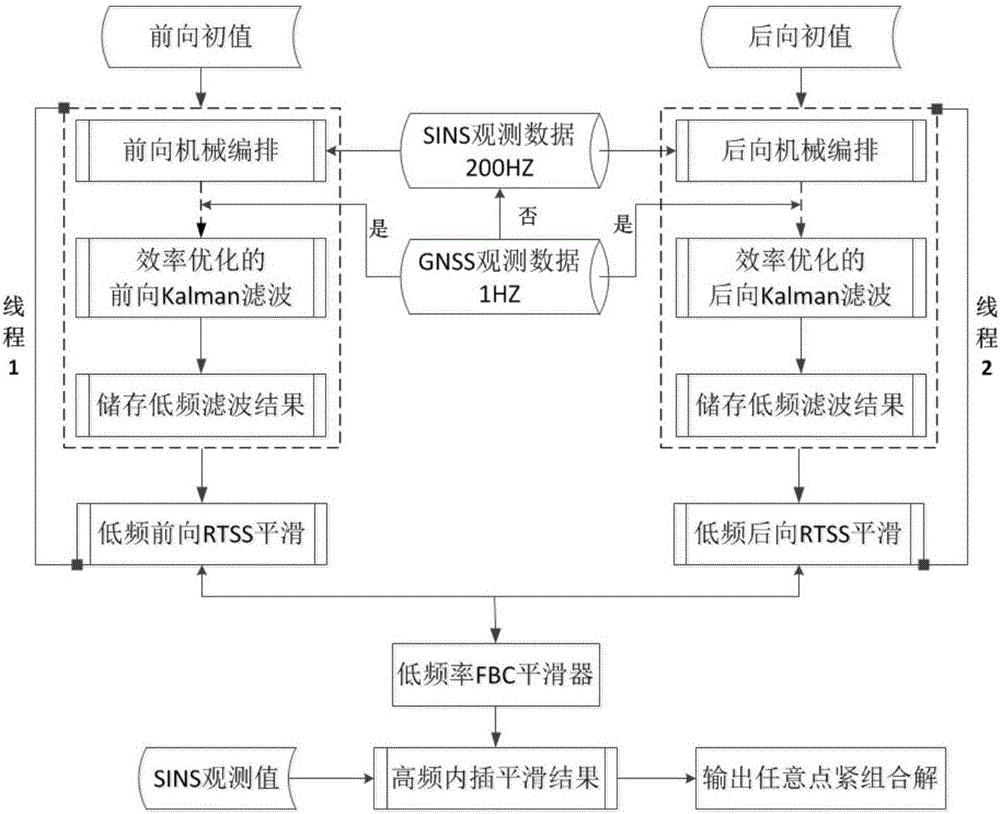
[0106] Algorithm overall structure of the present invention is as figure 1 As shown, the efficiency of the Kalman filter state forecast is optimized, the GNSS state parameters and the decomposed SINS state parameters are eliminated in the smoothing process, and the smoothing algorithm that combines RTSS and FBC after state dimensionality reduction is designed, and the filtering results saved at low frequencies are used for Smoothing, a method of obtaining a tight combination solution at any time by SINS mechanically arranging high-frequency interpolation; the technical solution is as follows:
[0107] Step 1. Use dual threads to set up two independent filters in the forward and backward direction, and input the SINS observation value, GNSS observation value and initial information in the forward and backward direction into the filter for initialization. The two-way filter shares the observation data in the same memory to avoid memory consumption and the time consumption caused...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More