

Bumblebee robot abdomen swinging control method based on virtual reality and reinforcement learning
A control method and reinforcement learning technology, applied in the field of insect robots, can solve problems such as inaccurate control of stimulation parameters, and achieve the effect of precise abdominal swinging behavior
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
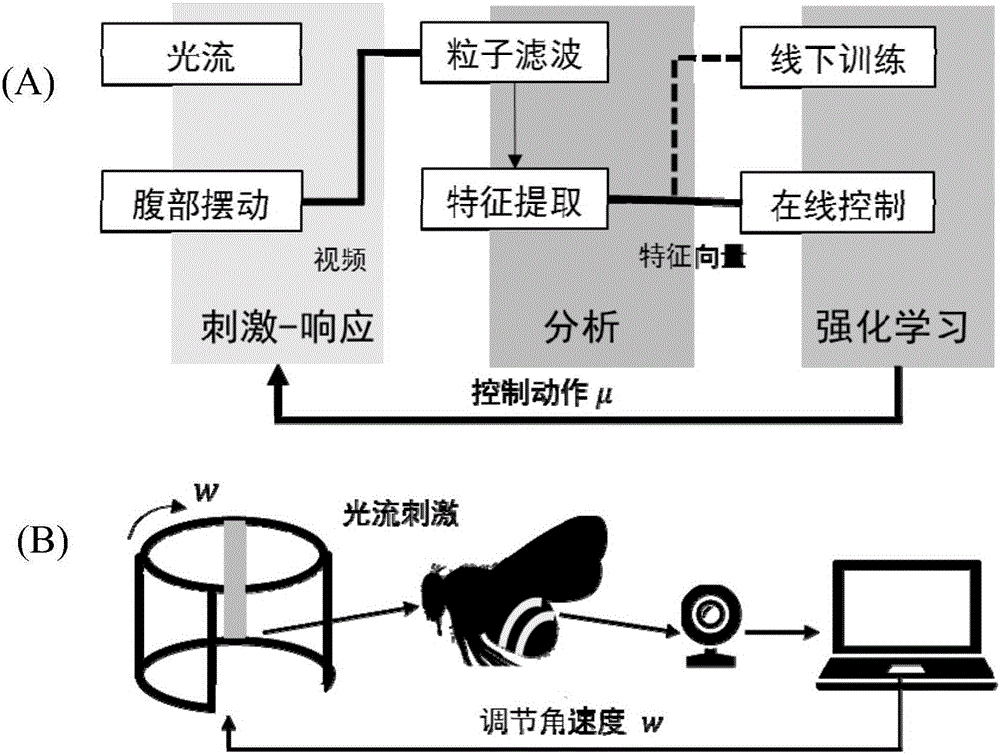
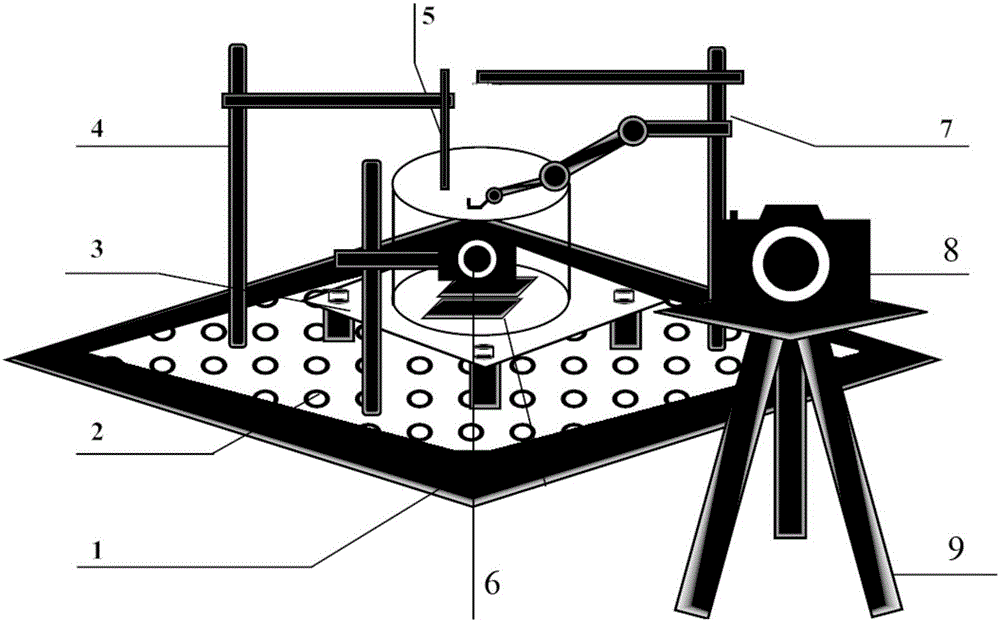
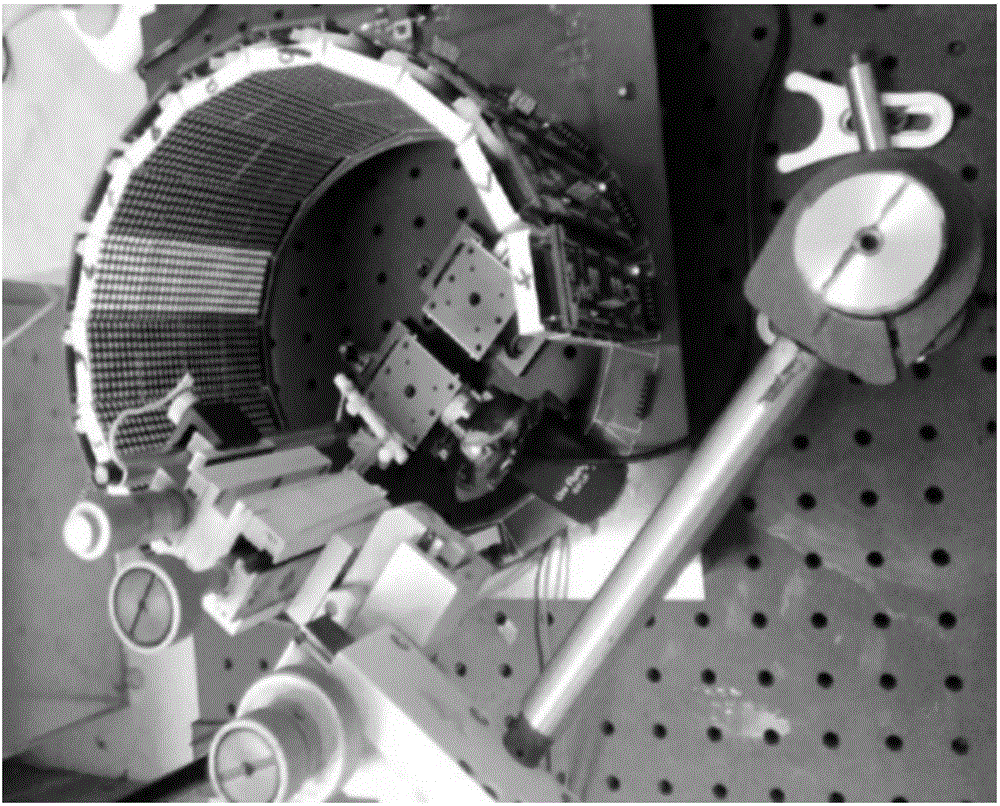
[0056] Such as figure 1 shown, where figure 1 (A) is the control loop of the closed-loop control system of the bumblebee robot based on virtual reality and reinforcement learning algorithm of the present invention. The control loop is that first the compound eyes of the bumblebee receive external optical flow stimulation, and then produce a corresponding abdominal swing; in order to catch the bumblebee The abdominal swing behavior of the bumblebee, the present invention uses the particle filter algorithm to track the abdomen tip of the bumblebee, and calculates its swing angle, and then performs feature extraction according to the sliding window; the extracted bumblebee abdomen swing feature is used as the environment state of the reinforcement learning algorithm, and the algorithm The stimulus parameters at the next moment will be selected, thus forming a closed-loop learning process. figure 1 (B) is then the physical composition of the bumblebee robot closed-loop control sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More