

Quick changing mechanism of operation robot for minimally invasive surgery
A technique for surgical robots and minimally invasive surgery, which is applied in surgical robots, surgical instruments, surgery, etc., and can solve problems such as scattered structural layout and large dimensions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
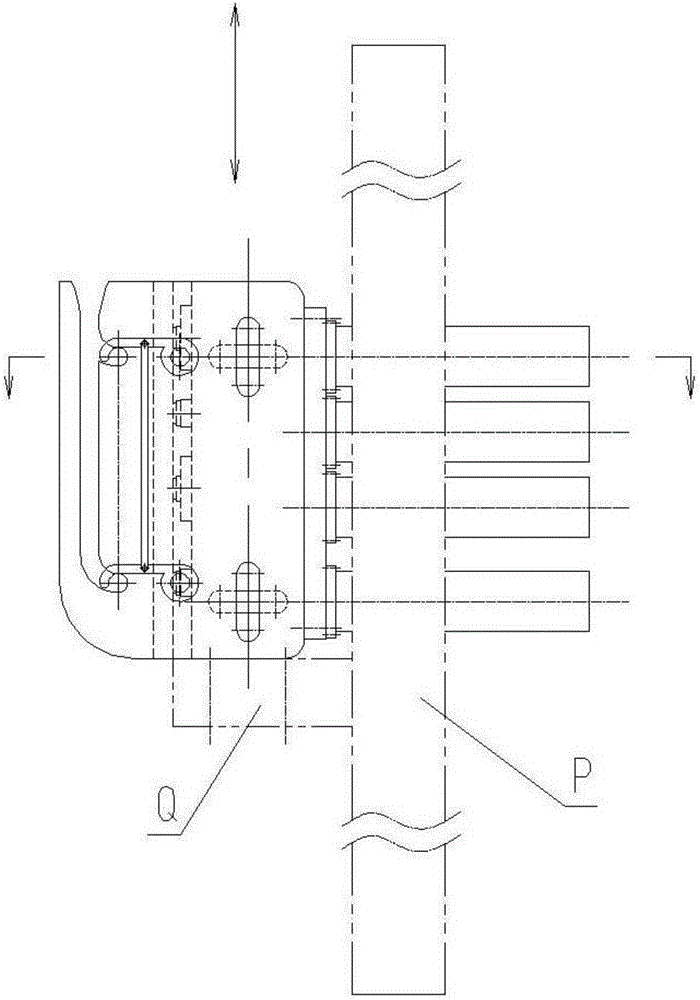
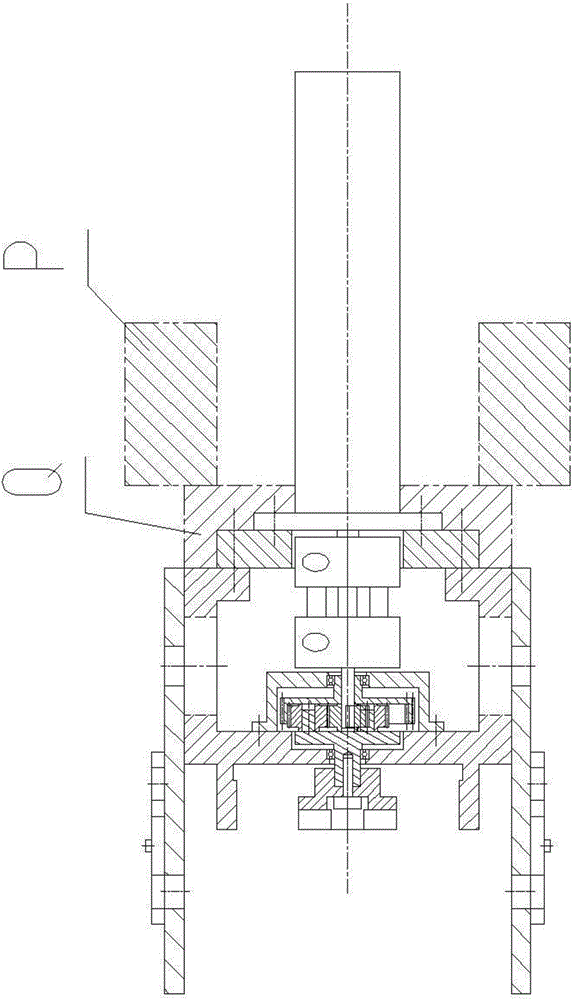
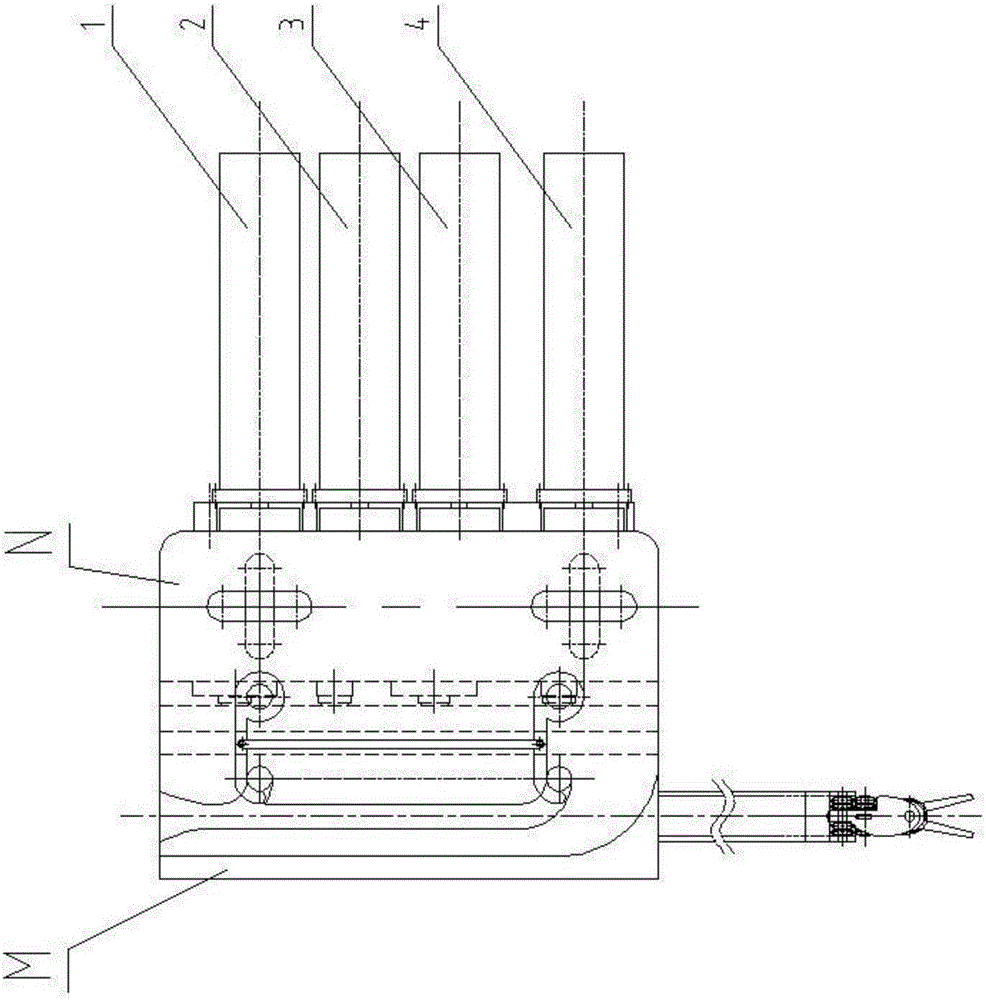
[0066] combine Figure 3 ~ Figure 6 To illustrate this embodiment, the quick change mechanism N consists of a left finger drive mechanism 1, a wrist joint drive mechanism 2, a right finger drive mechanism 3, an operation tube drive mechanism 4, an interface base, a connector 7, a connector 8 and a locking mechanism 9 and so on.
[0067] The left finger driving mechanism 1 consists of a large sun gear 1-1, a small sun gear 1-2, a planetary gear 1-3, a planet carrier 1-4, a sun gear shaft 1-5, an interface clutch disc 1-6, and a bearing 1- 7. Composed of bearings 1-8, couplings 1-9 and motors 1-10. The motor 1-10 is fixedly connected to the connector 7, the output shaft of the motor 1-10 is fixedly connected to one end of the coupling 1-9, and the other end of the coupling 1-9 is connected to the The sun gear shaft 1-5 is fixedly connected; the inner and outer rings of the big sun gear 1-1 have gears, and the big sun gear 1-1 is set on the sun gear shaft 1-5 and maintains a ra...
Embodiment 2
[0096] combine Figure 22 To illustrate this embodiment, on the basis of the technical solution of Embodiment 1, the locking mechanism of the quick change mechanism N can be changed to an additional Figure 12 The specific structure of the chute-type hook locking mechanism in is:
[0097] Two arc-shaped slots are respectively opened on each of the base covers 6, and the two ends of the locking hook 10 are hinged in the two arc-shaped chutes of the base cover 6. The axis of the locking hook 10 The direction is parallel to the end of the guide chute on the base cover 6 and the central connection line at the bottom of the middle groove, and the two ends of the locking hook 10 can slide in the two arc-shaped chute of the base cover 6, so There are two hooks on the locking hook 10, which are used to fix the two fixing pins on the actuator M of the surgical instrument.
[0098] When the surgical instrument actuator M is installed in the quick-change mechanism N, the surgical instr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More