

Logistics cargo volume non-contact measurement method based on binocular stereo vision and point laser range finding
A binocular stereo vision and non-contact measurement technology, which is applied to measuring devices, optical devices, instruments, etc., can solve the problems of large amount of calculation, easy to be affected by light and noise, and slow processing speed, etc., so as to improve the effective performance and accuracy, narrowing the scope of the search, and avoiding false matches
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
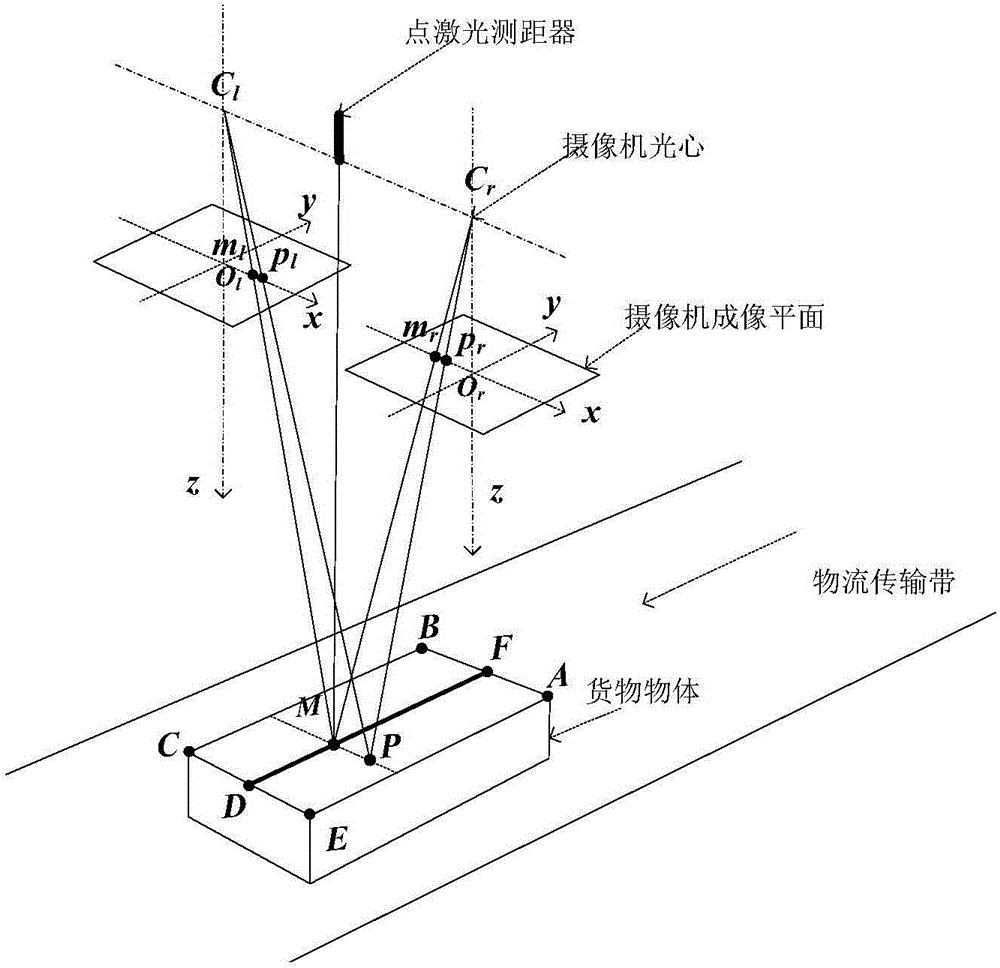
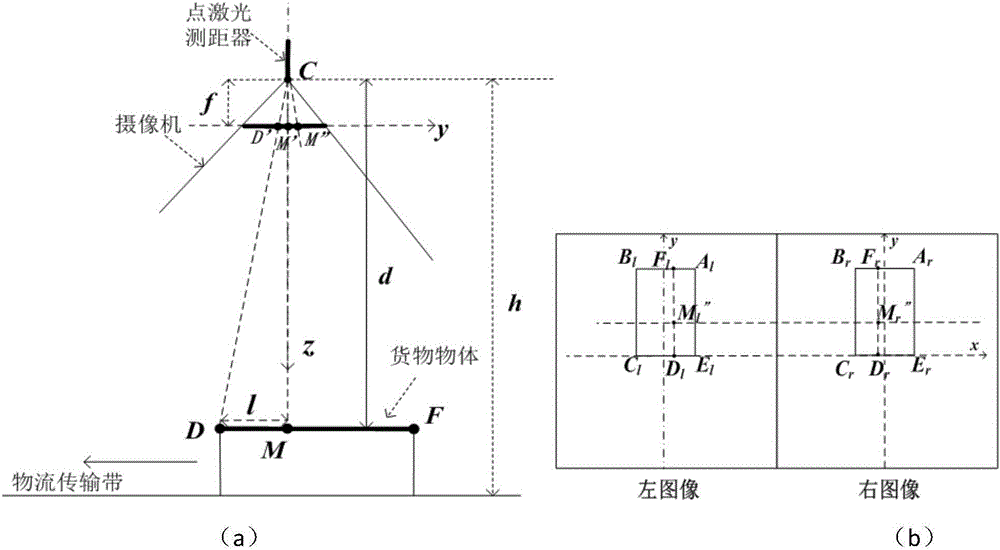
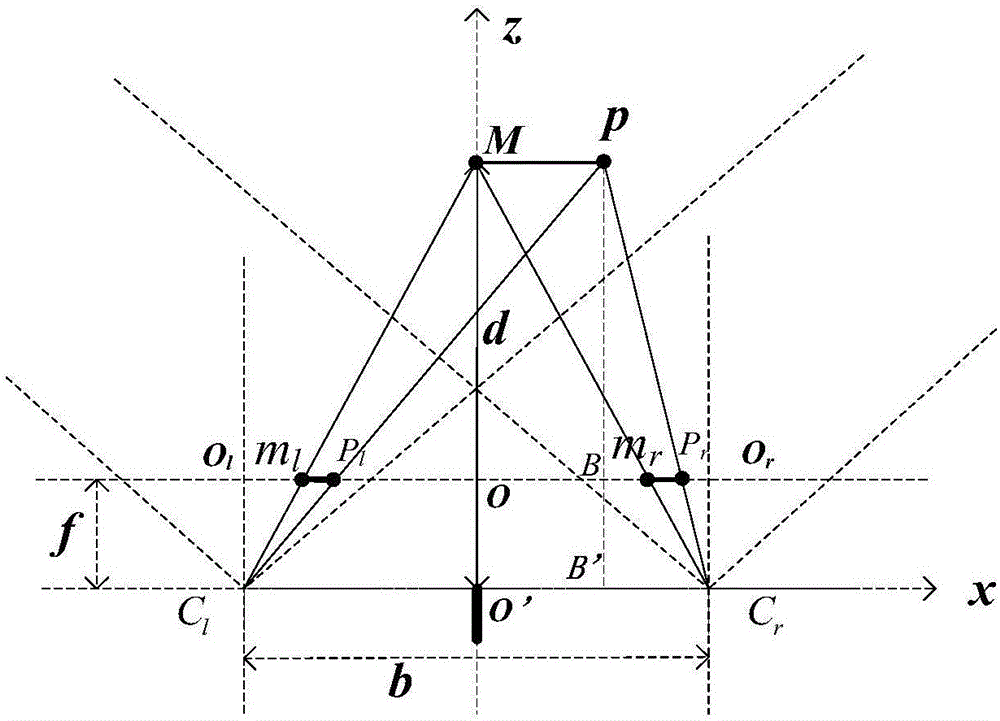
[0023] Using the binocular stereo vision system and point laser ranging to carry out the three-dimensional measurement algorithm of logistics cargo objects, the execution process is as follows:
[0024] Step 1: Use corresponding methods, such as camera calibration methods such as Zhang Zhengyou's flat panel calibration method and Tsai's two-step calibration method, to calibrate the camera to obtain the internal and external parameters of the camera and the image epipolar correction transformation matrix.
[0025] The internal and external parameters of the camera are obtained by camera calibration before measurement. At the same time, the transformation matrix for ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More