

Method for shortening intelligent car path planning and searching time based on heuristic search algorithm
A heuristic search and smart car technology, which is applied in the field of shortening the search time of smart car path planning, can solve the problems of large variation range of coding length, small solution scale, and low solution efficiency, so as to avoid long search time and optimize robustness sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
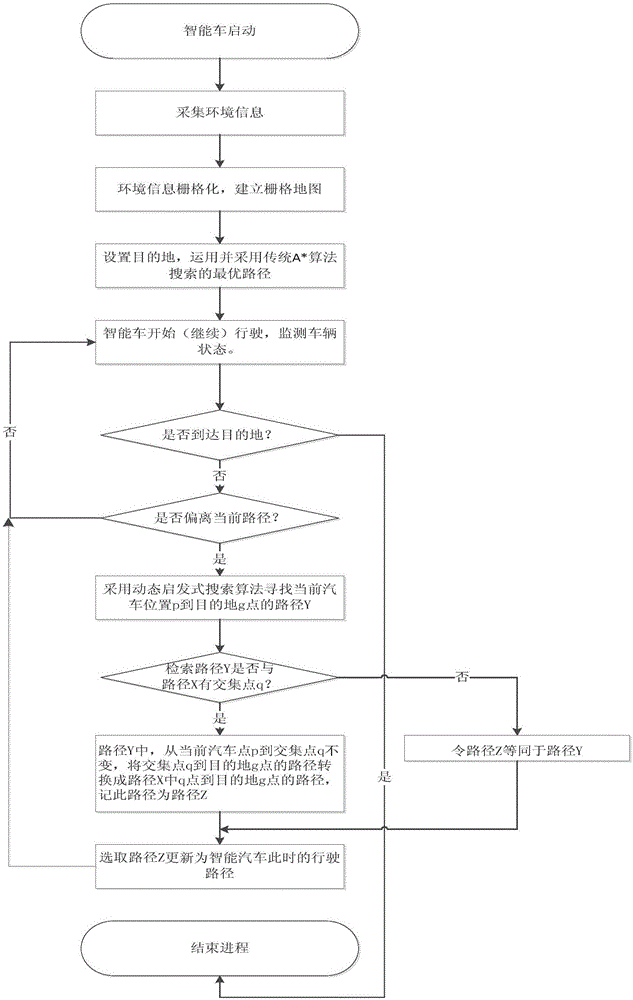
[0033] A kind of heuristic search algorithm based on the present invention shortens the method for smart car route planning search time, comprises the following steps:
[0034] (1) Use GPS and lidar tools to collect environmental information: First, import the global satellite positioning system using differential positioning technology to obtain a centimeter-level satellite map between the start and end points. When the prior map is known, the driverless car can Continuously correct its own position according to known maps to achieve precise positioning. In an unknown environment, unmanned vehicles can obtain environmental information through lidar and SLAM methods, and extract effective information through signal processing to construct an environmental map.
[0035] (...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More