

Robot trajectory planning method based on genetic chaos optimization algorithm
A technology of chaotic optimization and trajectory planning, applied in instruments, adaptive control, control/regulation systems, etc., can solve problems such as poor local search ability, and achieve the effects of improving work efficiency, prolonging service life, and smoothing curves
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0037] Existing methods are path planning methods, generally for mobile robots. The invention seeks the time-optimized motion trajectory under the condition of satisfying the rated limit value of the robot servo motor. It is the planning of the robotic arm in a constrained motion space. Path planning is to find a series of path points to pass. These points are just some positions in space, or joint angles. Trajectory planning is to determine how to go, go How fast, you need to give time information to this path.
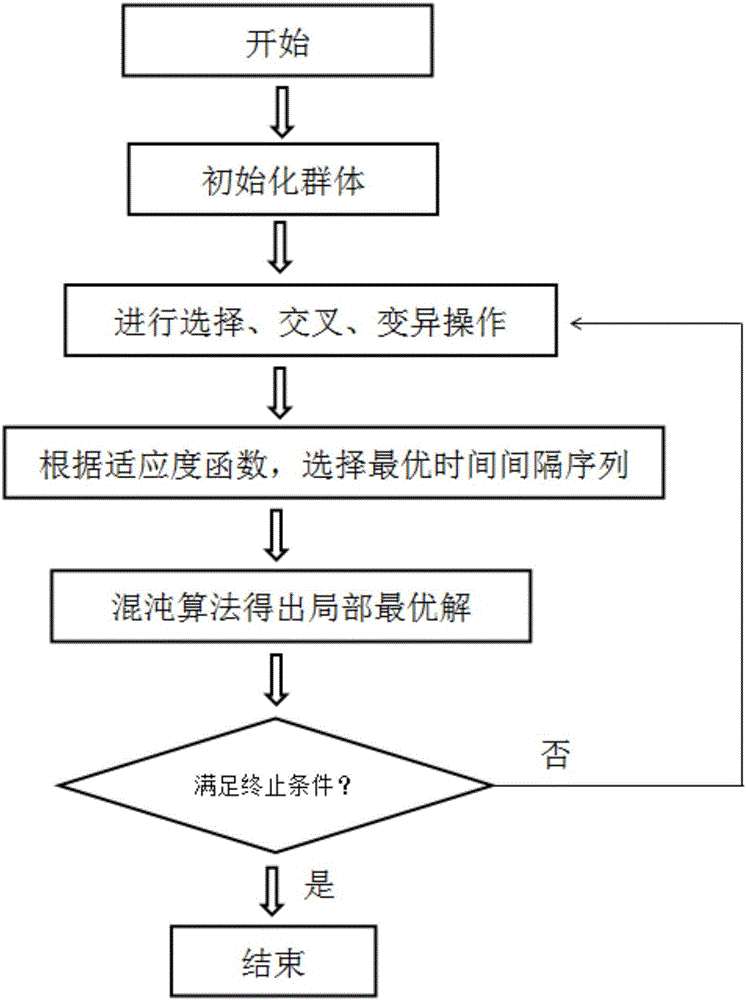
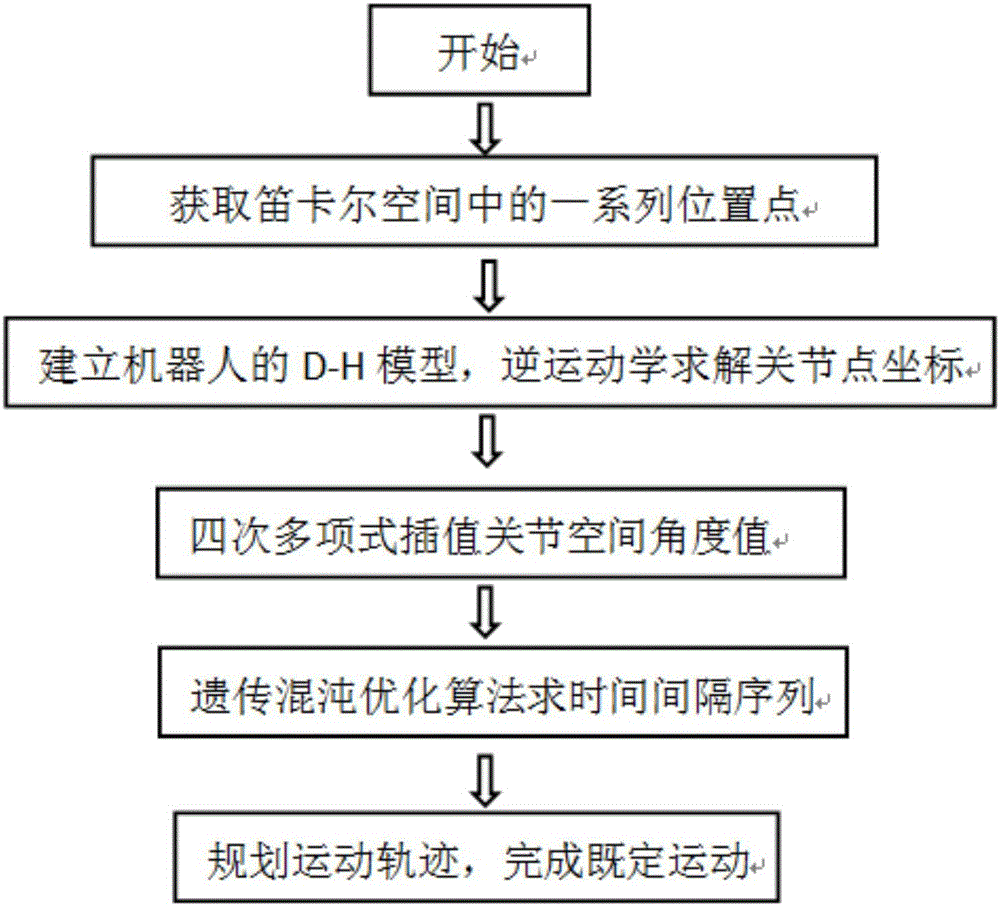
[0038] Robot trajectory planning method based on genetic chaos optimization algorithm, such as figure 2 As shown, the specific implementation steps are as follows:
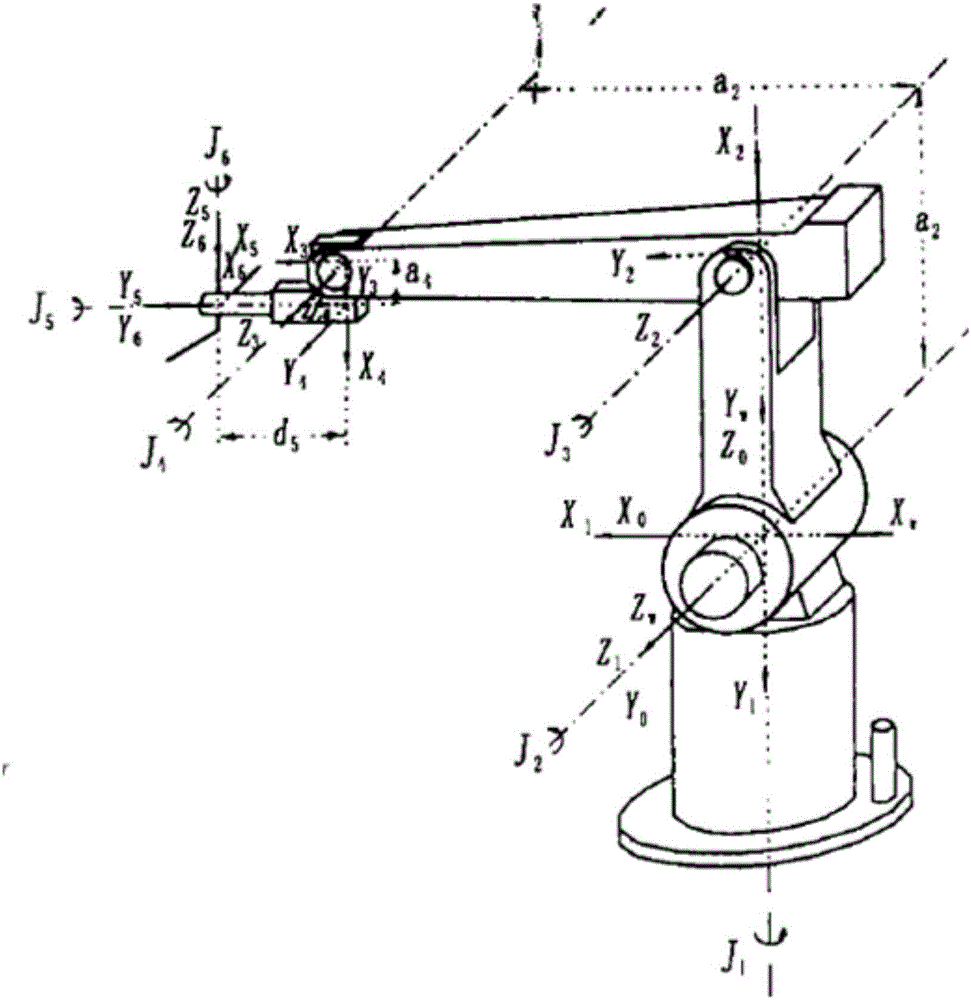
[0039] A: According to the actual situation, the end effector is interpolated at the starting point and the ending point by means of circular interpolation and linear interpol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More