

Group vision machine assisted assembly method and model system
An assembly method and visual machine technology, applied in general control systems, control/adjustment systems, instruments, etc., can solve problems such as difficulty in adapting to production models, low production efficiency, and large floor space, so as to save investment in production equipment and Occupies space, improves production efficiency, and has good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
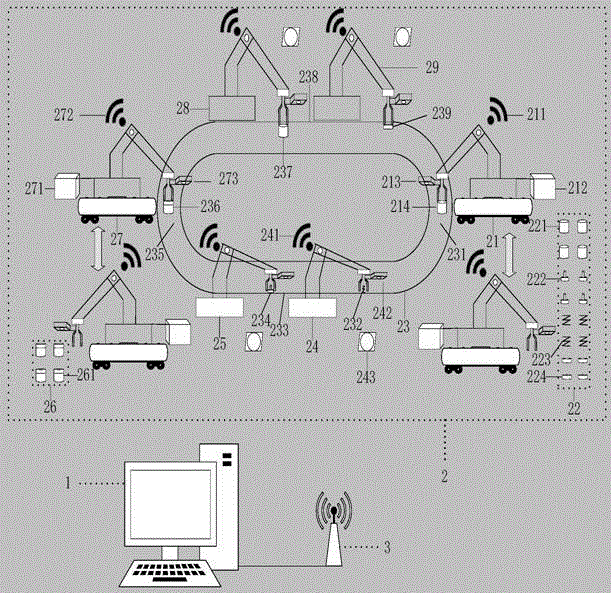
[0023] Such as figure 1 As shown, the group vision machine collaborative assembly model system of the present invention includes a control platform 1, a vision robot workstation 2, and a wireless module 3 responsible for communication between the control platform 1 and the vision robot workstation 2. The control platform 1 integrates the vision robot workstation 2 and sends back work information, and send control commands to the visual robot work platform 2 according to the integrated work information.
[0024]The visual robot workstation 2 includes a component storage area 22, a material loading area 231, an assembly area 233, an assembly area 238, a blanking area 235, and a finished product storage area 26, wherein the component storage area 22 places four kinds of components 221, 222, 223, 224, the loading area 231 and the unloading area 235...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More