

Single-driving double-directional crawling-type pipeline cleaning robot
A creeping, robotic technology, applied in the direction of cleaning sewer pipes, pipe components, special pipes, etc., can solve the problems of many power sources, high labor intensity and high degree of danger, and achieves improved maneuverability, good pipe diameter adaptability, The effect of improving battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
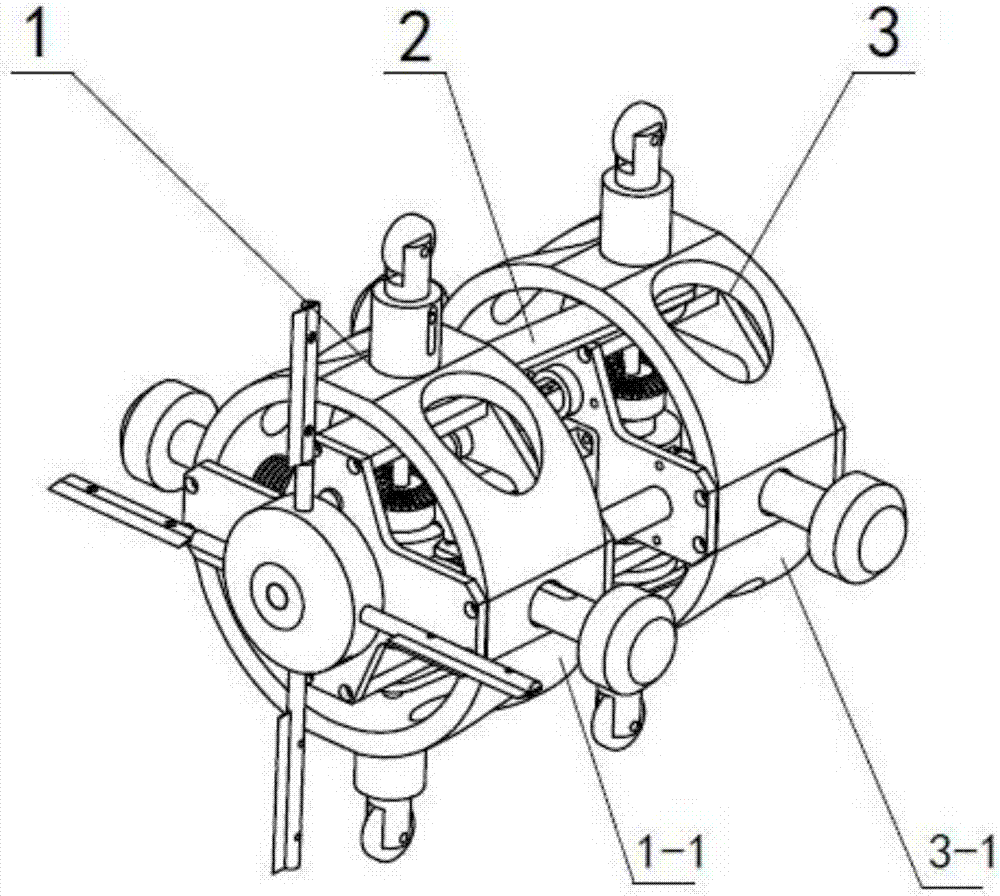
[0063] The walking process of the pipeline robot, such as Figure 13 , 14 , 15a ~ e shown. according to Figure 13 The rotation angle position of the middle and rear rest cams changes, Figure 14 S1 and S2 in represent the radial support states of the front body and rear body, respectively. For the convenience of description, the robot is divided into three parts, namely the front body B1 (radial expansion), the middle body B2 (axial expansion) and the rear body B3 (radial expansion). At the same time, the stretching state of each part is divided into three types according to the degree of stretching, which are fully stretched, intermediate, and fully retracted states. Among them, the radial fully contracted state does not support the pipe wall, the radial intermediate state plays a weak supporting role on the pipe wall, and the radially fully extended state plays a strong supporting role on the pipe wall. The walking process of the pipeline robot is described in detail a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More