

Multi-hypothesis UKF target tracking method for UHF-RFID system
A UHF-RFID and target tracking technology, applied in the field of mobile robot positioning, can solve the problems of excessive dependence on virtual signal strength values, positioning divergence, large errors, etc., to overcome easy divergence, good positioning accuracy and convergence speed, and improve The effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings.
[0023] refer to Figure 1 to Figure 5 , a multi-hypothesis UKF target tracking method for UHF-RFID system, the method comprises the following steps:
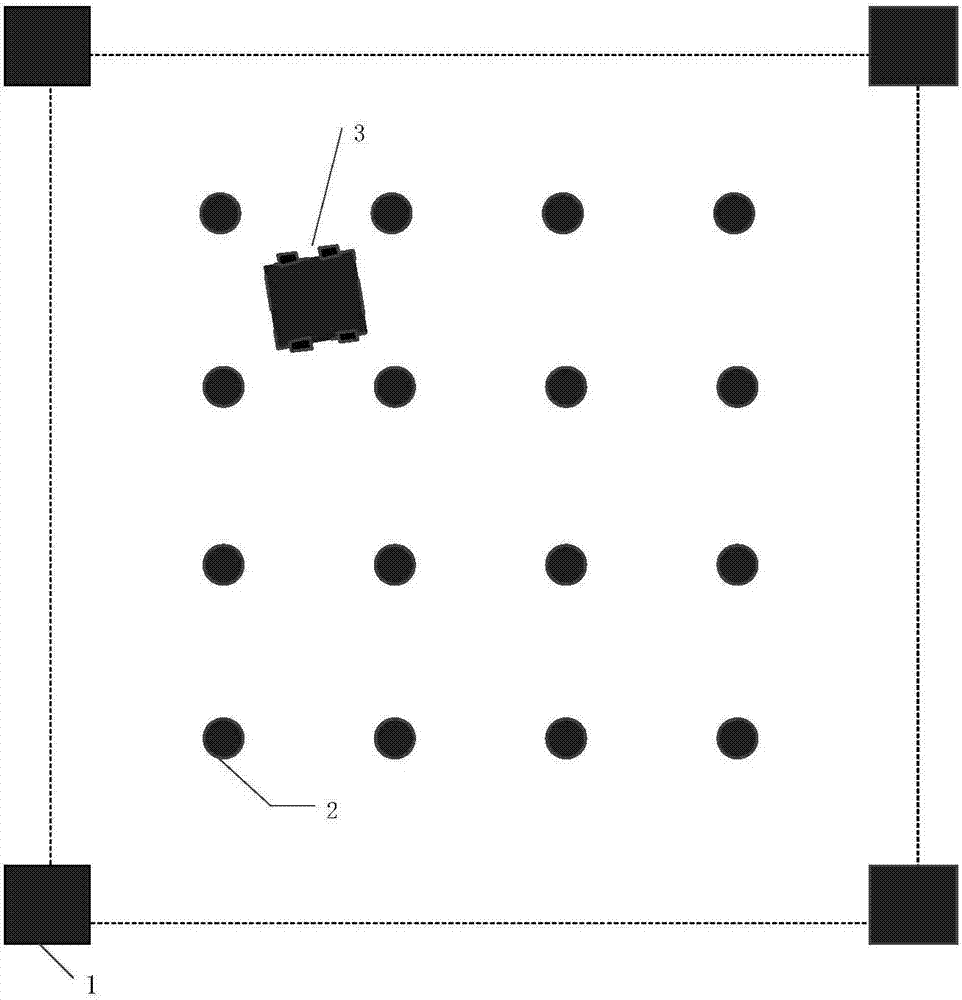
[0024] figure 1 The positioning environment of mobile robots under UHF-RFID is described in . In the figure, 1 represents the UHF antenna, 2 represents the reference label, and 3 represents the mobile robot. The positioning area is 8*8, and the area contains four UHF antennas distributed on the boundary of the area to be located, and 16 reference labels. The reference labels are as follows: figure 1 Evenly arranged in the monitoring area. Among them, the four antennas collect RSSI data of each reference tag in a polling manner. Mobile robots carry odometers and mobile sticky notes.
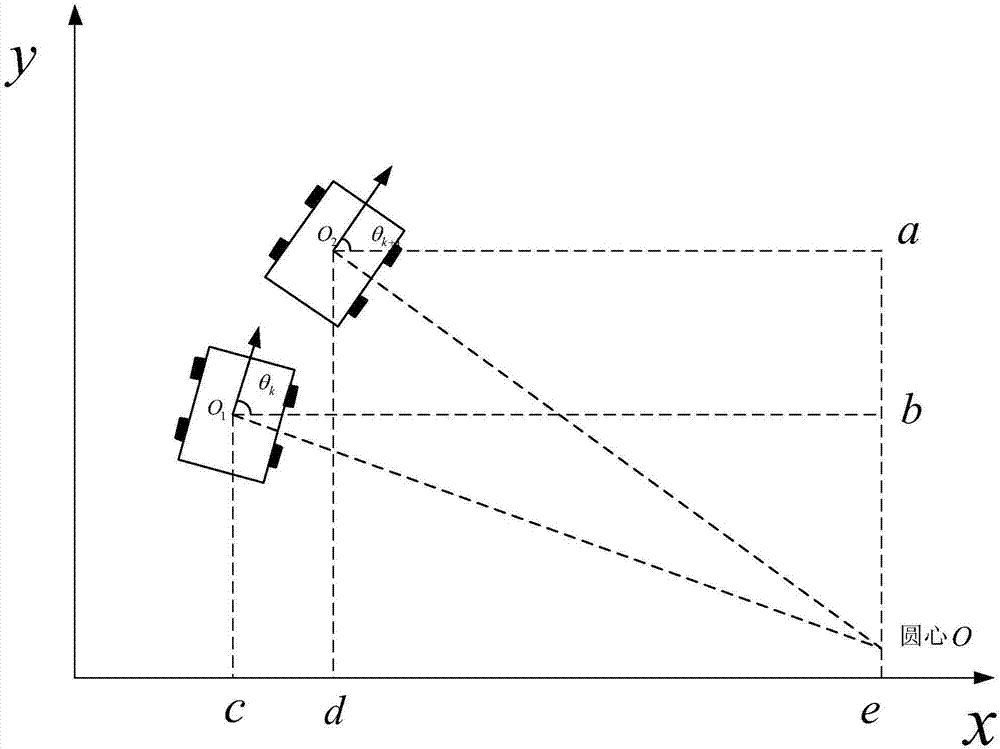
[0025] combine figure 2 As shown, the mobile robot kinematics model can be described as the following state space model:
[0026] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More