

Gesture tracking method based on population randomly-scrambled multi-target genetic algorithm
A multi-objective genetic and population technology, applied in the field of human-computer interaction automatic control of the manipulator, can solve the problems of low flexibility, inability to guarantee position accuracy, and inability to directly control the displacement and speed of the manipulator by operating instructions, so as to improve the intuitiveness and convenience, overcome the complexity and difficulty of application, and the best effect of arm tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with drawings and embodiments.
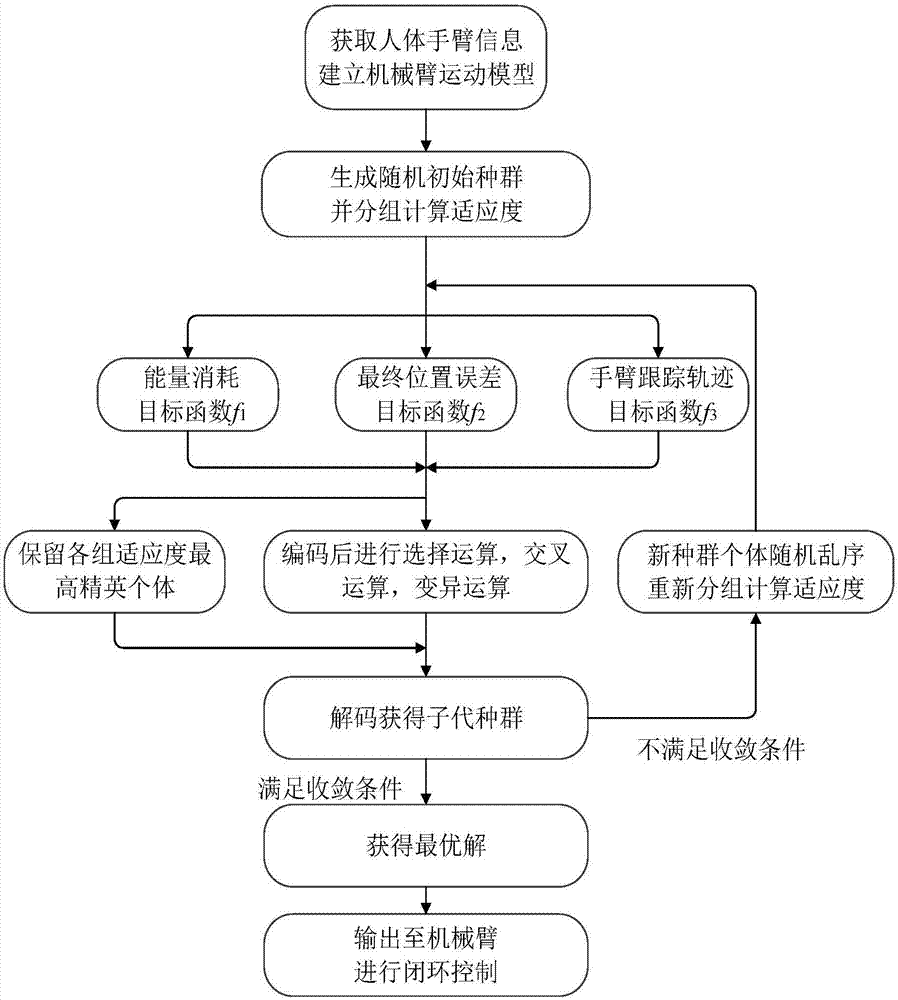
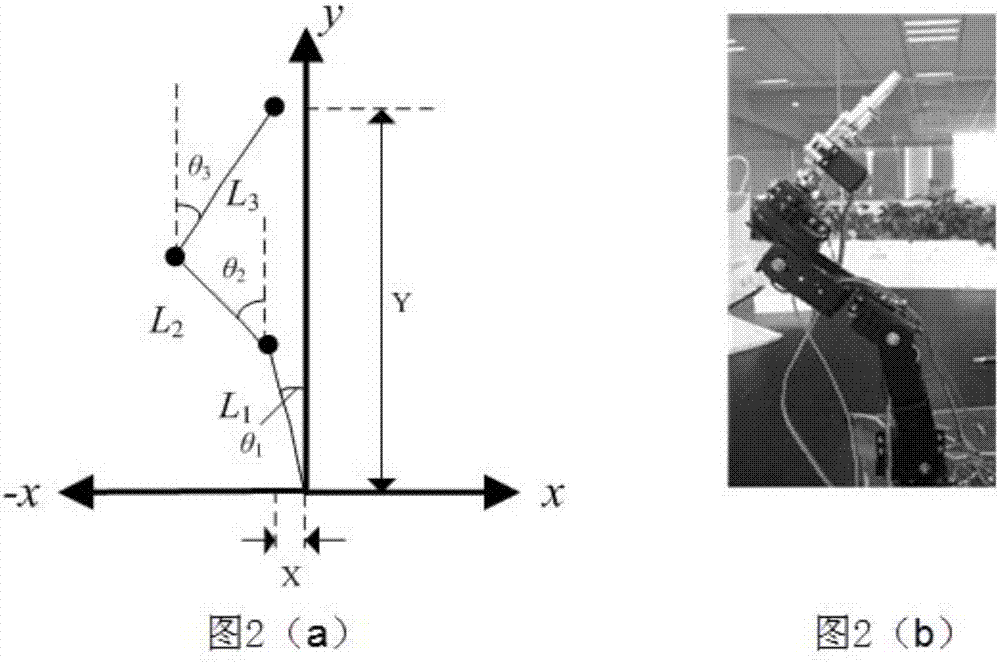
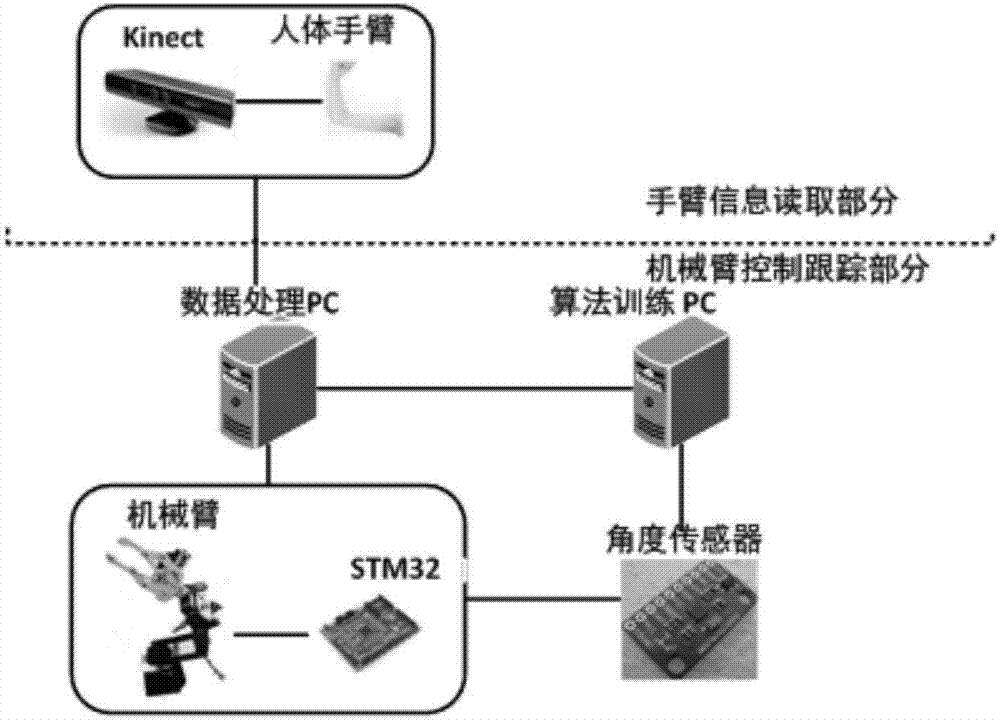
[0042] The present invention provides a gesture tracking method based on population random disorder multi-objective genetic algorithm. image 3 , consists of a Kinect sensor, a personal computer, an STM32 single-chip microcomputer system, a 6-degree-of-freedom robotic arm, and an ADXL345 three-axis angular acceleration sensor. Schematic diagram of the experimental environment and effects such as image 3 shown. Among them, after the simplified dynamic model is established, the lengths of the three joints of the six-degree-of-freedom manipulator are L 1 =17cm,L 2 =10cm,L 3 =17cm, the weight is G 1 =0.8kg, G 2 =0.6kg, G 3 = 0.4 kg. The system runs as figure 1 As shown, first capture the depth data stream obtained by Kinect, build a three-dimensional skeleton information map of the human body in the personal computer, obtain the data of the joints of the right arm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More