

State fusion target tracking method based on predicted value measurement conversion
A technology for measurement conversion and target tracking, which is used in measurement devices, radio wave measurement systems, and radio wave reflection/re-radiation. It can solve problems such as biased state estimation and Kalman gain dependence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0116] In the embodiment, it is considered to perform tracking simulation on two kinds of target movement scenarios in polar coordinates.
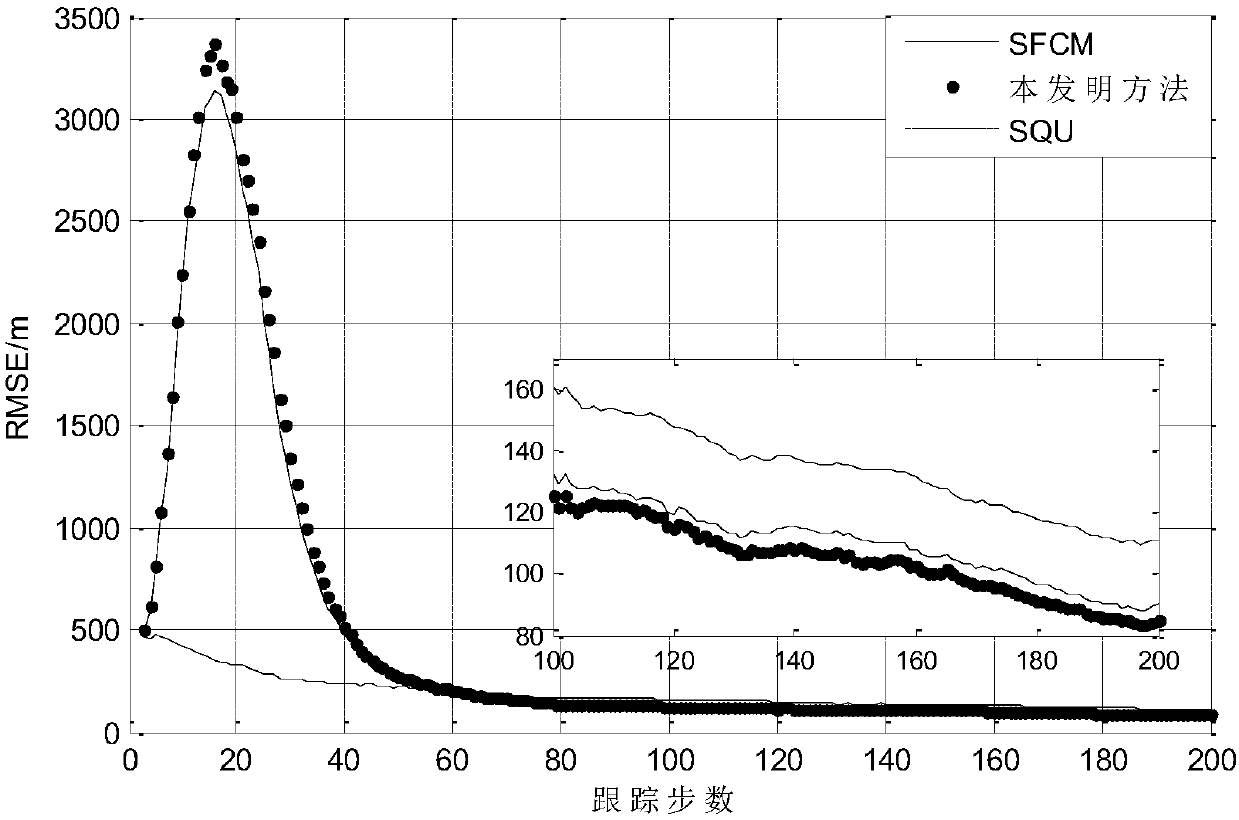
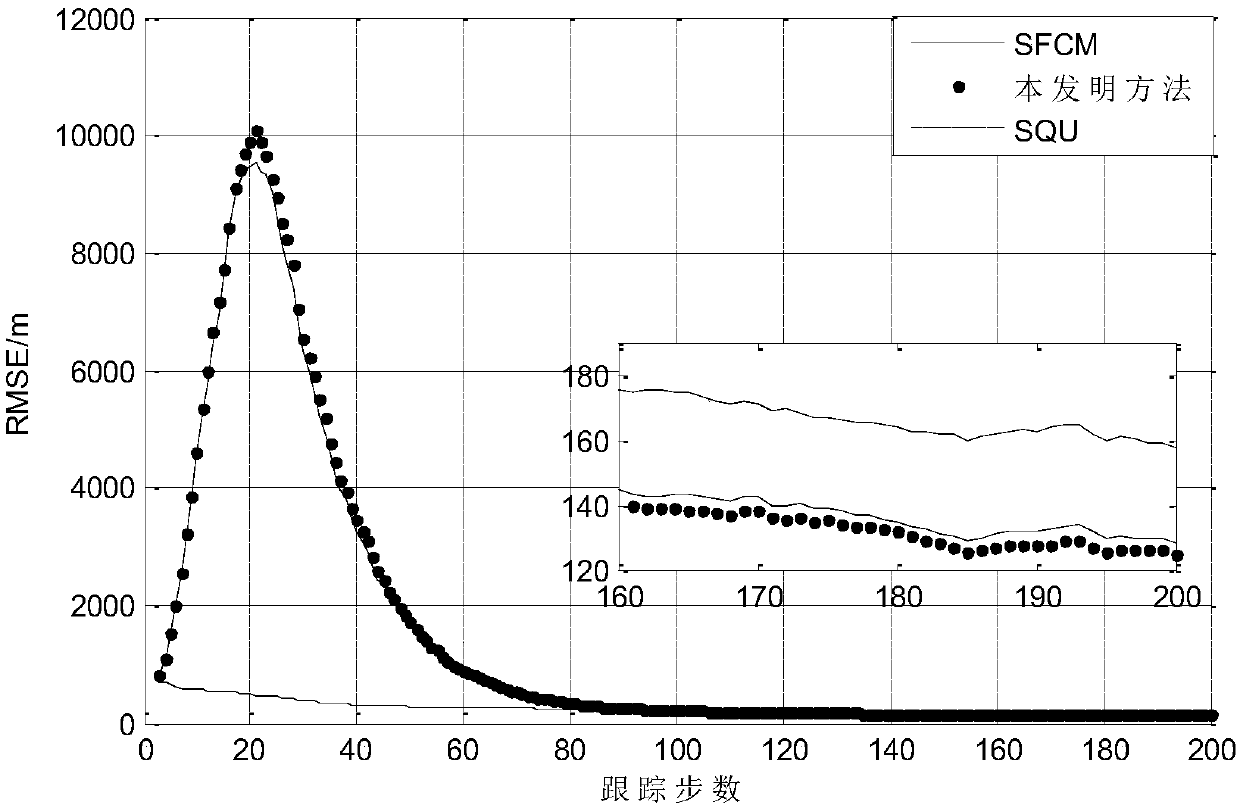
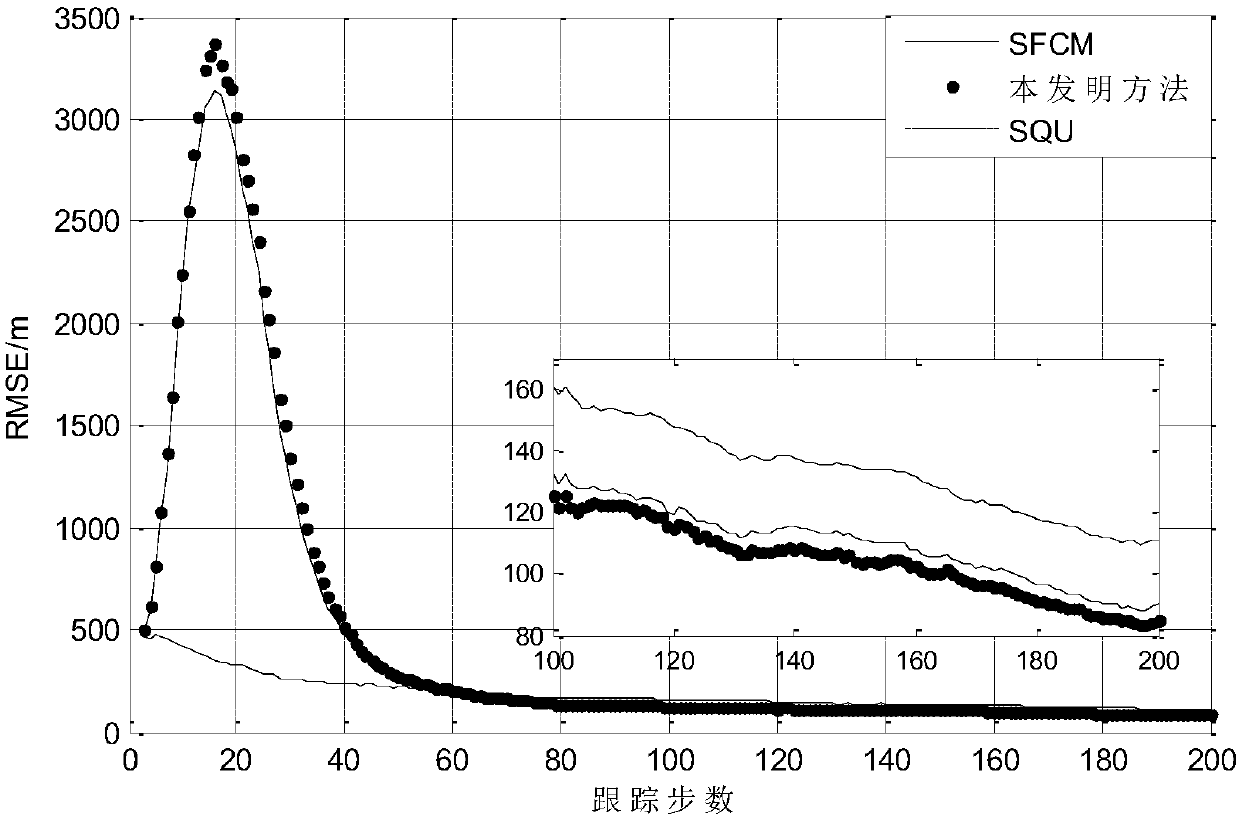
[0117] In the polar coordinate system, the sensor is located at the origin of the coordinates, and provides the target's slant range, azimuth and Doppler measurement data with a sampling period of 1s, and the noise standard deviation of the measurement process is 0.001m 2 / s. The target initial value position is (50km, 50km), and the initial speed is (5m / s, 5m / s). 500 Monte Carlo simulations were performed for different values of process noise standard deviation, distance, azimuth, Doppler measurement noise standard deviation, and correlation coefficient between Doppler velocity and distance.
[0118] Scenario 1: The distance measurement error of the sensor is 10m, the azimuth measurement error is 0.5 degrees, the Doppler velocity measurement error is 0.1m / s, and the correlation coefficient between Doppler velocity and distance is 0.1. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More