

Recent update information-based dynamic linearization self-adaptive control law algorithm for SISO system
An adaptive control and linearization technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as low precision, poor convergence, and weak trajectory tracking ability, and achieve good tracking Ability, strong convergence, rich and flexible parameter adjustment methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] specific implementation plan
[0026] The present invention will be further described in detail below through specific embodiments in conjunction with the accompanying drawings.
[0027] A general nonlinear discrete-time system can be expressed as:
[0028]
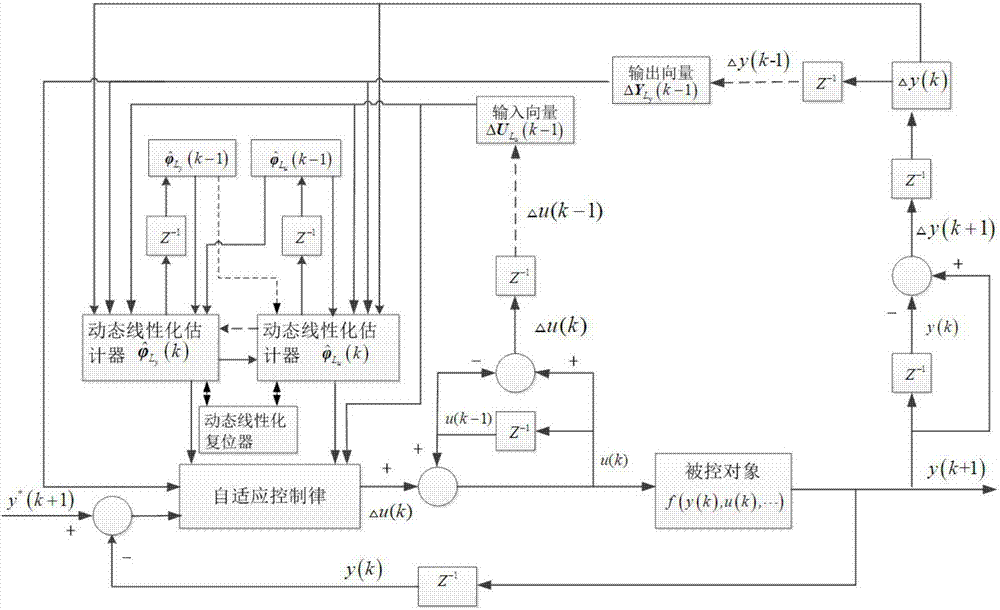
[0029] in, y(k-1)...y(k-n)}, μ(k-2)…μ(k-m)}, μ(k) and y(k) are the input and output of the system respectively, f(*) is any nonlinear function, m and n are the unknown order of the system respectively . attached figure 1 middle, y * (k+1) is the tracking signal expected by the system.
[0030] The dynamic linearization parameter pseudo partial derivative identification model of single-input single-output SISO system is decomposed into two dynamic linearization parameter sub-identification models for input and output respectively and as follows:
[0031]
[0032]
[0033] Use the projection method to identify the two sub-identification models decomposed above and and get its estimation algo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More