

Large-size bus body key dimension detection system solving scheme based on multi-view vision
A multi-eye vision and detection system technology is applied in the field of detection systems for key dimensions of large bus bodies, which can solve the problem that the detection accuracy requirements of key dimensions and tolerances of large bus bodies cannot be met, and the on-line detection and measurement accuracy of key dimensions of large bus bodies cannot be met. Comprehensive error and other problems, to achieve the effect of simple structure, good adaptability and good site adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the drawings:
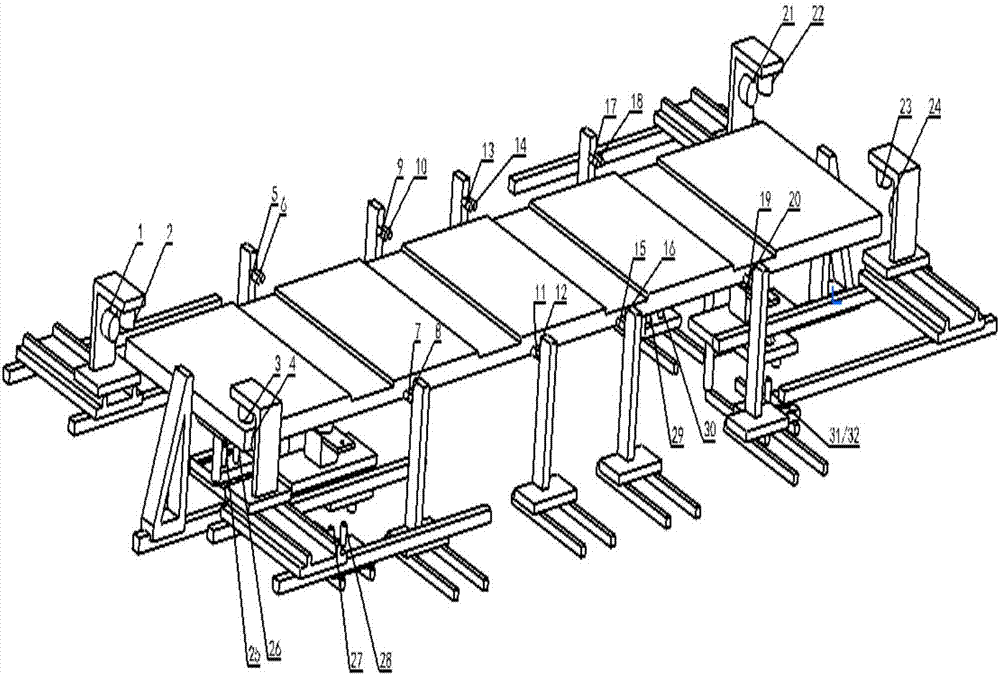
[0031] Refer to figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 As shown, the specific implementation of the present invention is: each binocular CCD camera detection subsystem passes through the laser tracker and the fusion transformation matrix H i The calibration of the unified world coordinate system is completed, and the measurement modules are connected through the car body to form an overall frame.
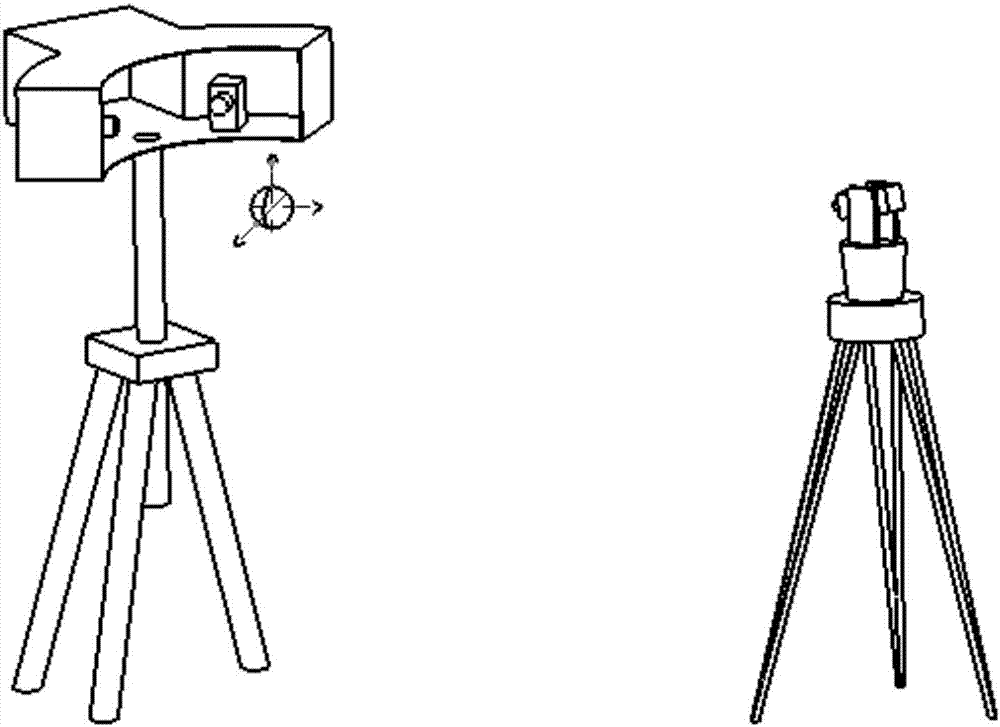
[0032] Refer to figure 2 As shown, the checkerboard calibration board is used to calibrate the internal and external parameters of a group of (2) CCD cameras fixed on the bracket to form a binocular CCD camera detection subsystem. The detection subsystem of the binocular CCD camera simultaneously shoots a target board with three high-precision standard small steel balls with a diameter of 20mm installed in a fixed position in the public effective field of view. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More