

High-mobility active capture type anti-unmanned aerial vehicle system and method
An anti-UAV and UAV technology, applied in the field of high-mobility active capture anti-UAV systems, can solve the problems of high secondary capture cost and poor maneuverability, achieve low take-off conditions, improve accuracy and The effect of maneuverability and fast cruising speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
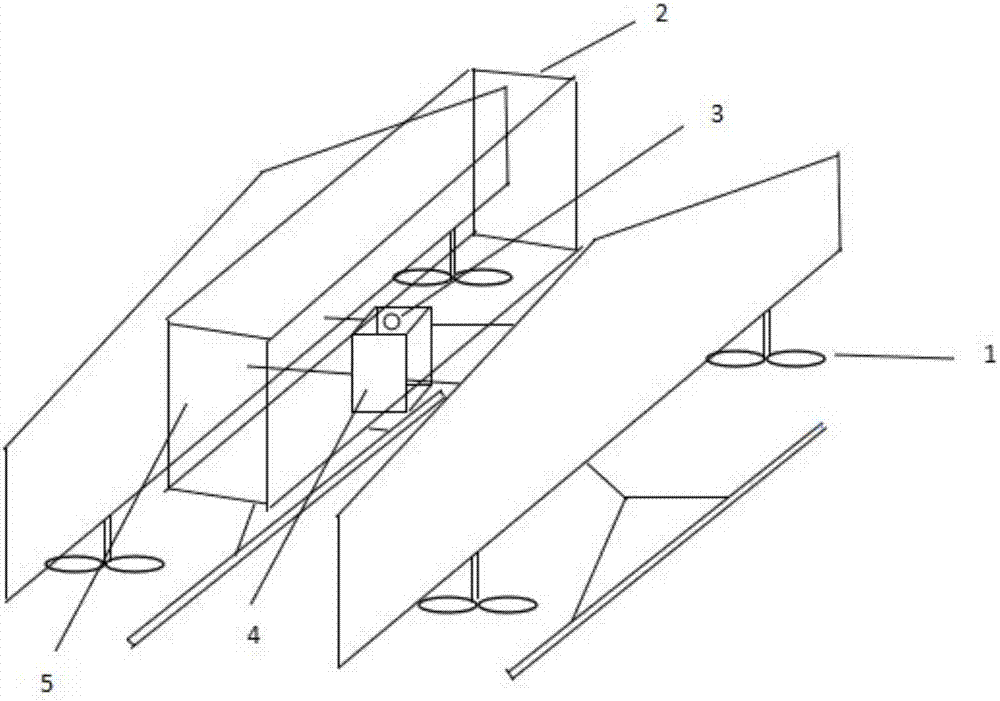
[0044] Such as figure 1 As shown, a highly maneuverable active capture anti-UAV system, including:
[0045] The unmanned aerial vehicle system consists of a tilting fuselage unmanned aerial vehicle 1, a capture frame 2, a camera or infrared sensor 3, a flight control and electromagnetic interference system, and various sensor devices 4, a catch net 5 and a second optical radar 7, in:
[0046] The capture frame 2 is installed between a pair of fixed wings of the tilting body type UAV 1, and is located above the tilting body type UAV 1; the capture frame 2 is fixed on The tilting fuselage type UAV 1 will not damage the aerodynamic shape of the fuselage;
[0047] The camera or infrared sensor 3 is installed at the center of the tilting body type UAV 1 for terminal guidance: when the target aircraft 8 enters the terminal guidance area of the tilting body type UAV 1 (i.e. the camera Or the infrared sensor 3 can clearly detect the area of the target aircraft 8), the tilting f...
Embodiment 2
[0064] A highly maneuverable active capture anti-drone system, which differs from Embodiment 1 in that image sensors or ultrasonic sensors are used for terminal guidance.
[0065] The image sensor or ultrasonic sensor is installed on the top of the tilting body type UAV 1, and the image sensor or ultrasonic sensor is used for the terminal guidance of the tilting body type UAV 1, and detects the position of the target aircraft 8 and pursues it ;in:
[0066] The image sensor is used to collect the image of the target aircraft 8 and package the collected image data, specifically including image preprocessing, feature extraction, and similarity measurement with the feature parameters of the template image to complete the recognition task, and simultaneously calculate Get the coordinates and angles of the target aircraft 8 in the image coordinate system, then transfer the image data to the flight control system, and the flight control system processes and processes the information ...
Embodiment 3
[0070] Based on the system described in the above-mentioned embodiments 1 and 2, a highly maneuverable active capture anti-drone method includes:
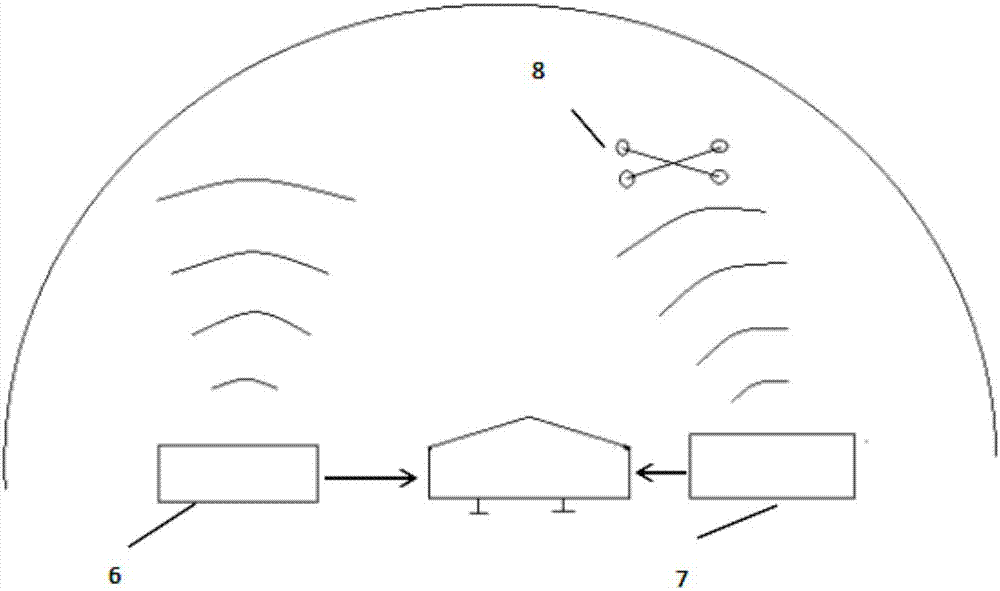
[0071] First, the ground station system monitors the set area in an all-round way through the first optical radar. Once the target aircraft is found to enter the set area, it sends the position information of the target aircraft to the anti-UAV system; the anti-UAV system receives After the location information of the target aircraft is chased and captured, the ground station system is used to transmit signals during the pursuit and capture process of the UAV, and controls the UAV to locate and chase the target aircraft;
[0072] In the final stage of approaching the target aircraft, the UAV adopts a composite guidance method, specifically:
[0073] When the drone is chasing the target aircraft head-on, it detects the precise position of the target aircraft through the terminal guidance device, and transmits an electromagnetic inte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More