

Industrial robot dragging teaching method without adopting torque sensor
An industrial robot, dragging and teaching technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of high sensor cost, limited application, uncertainty of friction compensation in low-speed area, etc., and achieve smooth traction and movement. , the effect of improving accuracy and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The embodiments of the present invention are described in detail below. Examples of the embodiments are shown in the accompanying drawings, in which the same or similar reference numerals indicate the same or similar elements or elements with the same or similar functions. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to explain the present invention, but should not be construed as limiting the present invention.
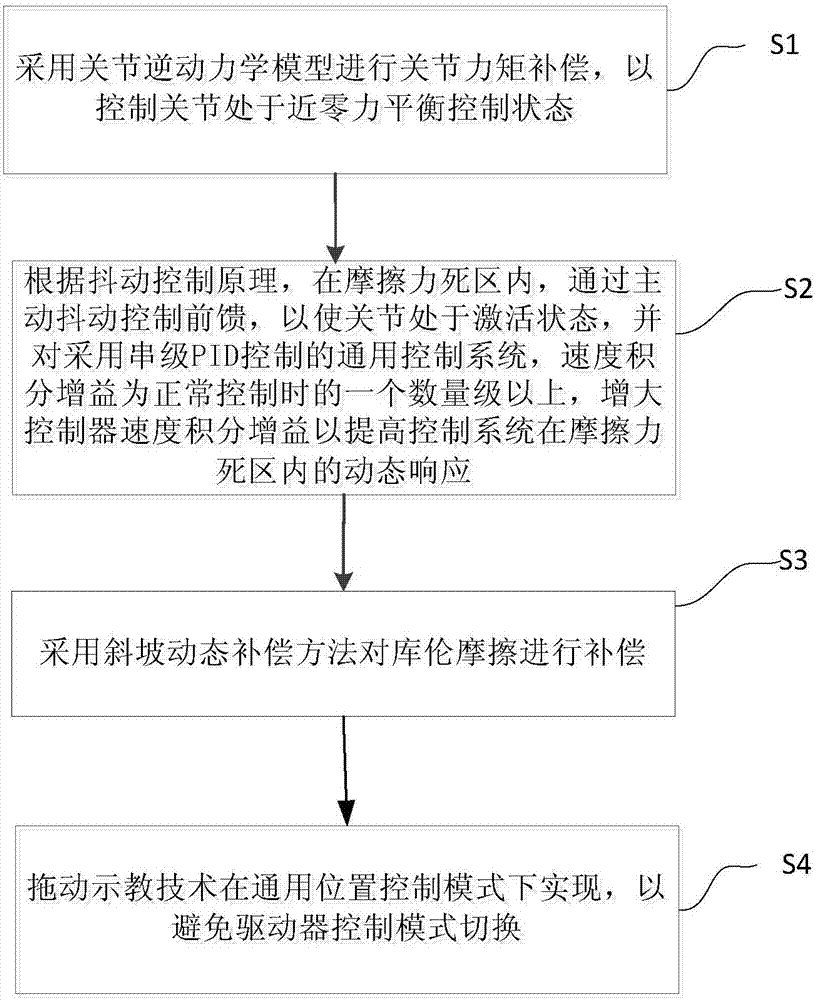
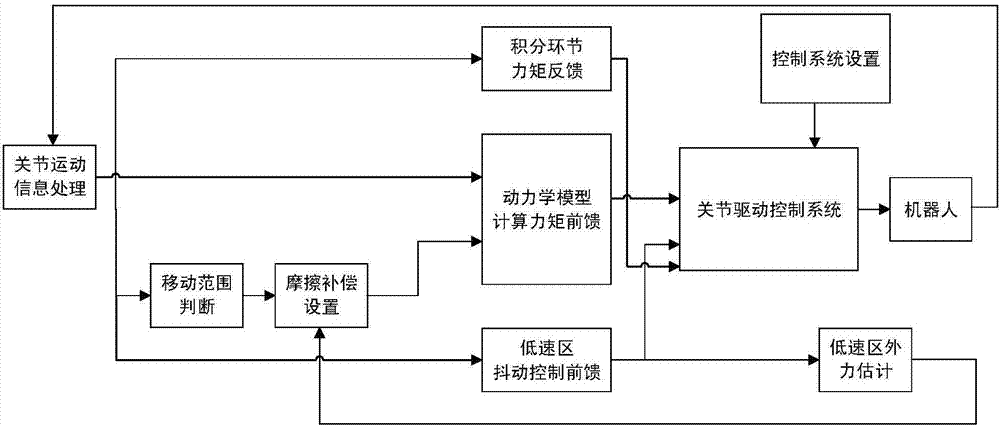
[0050] Such as figure 1 with figure 2 As shown, the drag teaching method of an industrial robot without a torque sensor in an embodiment of the present invention includes the following steps:
[0051] In step S1, the joint inverse dynamics model is used to perform joint torque compensation to control the joint in a near-zero force balance control state.
[0052] Specifically, the following joint inverse dynamics model is used for joint torque compensation, and the joint is in a nearly zero force balance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More