

Marker positioning method and system of calibration plate image
A positioning method and positioning system technology, applied in the field of marker positioning, can solve the problems of weak robustness, low algorithm efficiency, long running time, etc., and achieve the effect of improving positioning efficiency, reducing debugging difficulty, and ensuring positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described in detail below through specific embodiments in conjunction with the accompanying drawings.
[0049] Definitions of terms used in the present invention:
[0050] An image pyramid is a structure for explaining images at multiple resolutions. An image pyramid is a collection of progressively lower resolution images arranged in a pyramid shape. The bottom image of the pyramid is a high-resolution representation, while the top is a low-resolution representation.
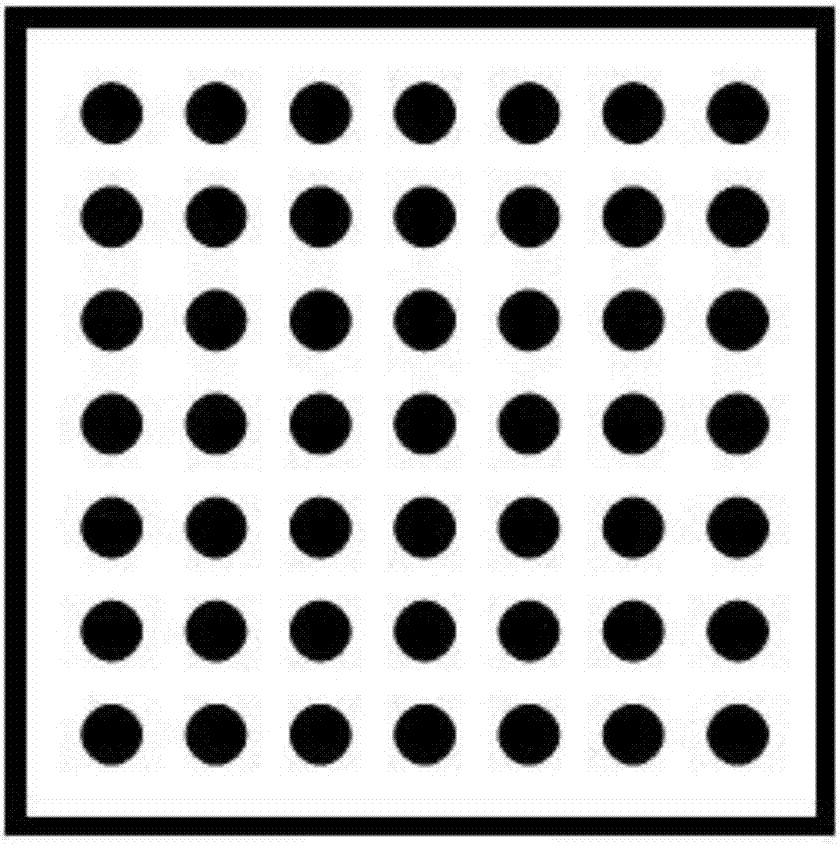
[0051] Region of interest (ROI, region of interest), in machine vision, image processing, outlines the area that needs processing from the processed image with the mode such as box, circle, ellipse, irregular polygon, adopts rectangular square in the present embodiment frame.
[0052] The present invention calculates the resolution size of the calibration board image (target image) to determine the required number of image pyramid layers; performs down-sampling of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More