

Underwater robot oriented underwater communication method
An underwater robot and underwater communication technology, applied in wireless communication, transmission systems, electrical components, etc., can solve the problems of Doppler frequency shift and multipath effect, high water quality requirements for optical communication, and high environmental noise for underwater acoustic communication. , to reduce the probability of communication collisions, ensure reliability and scalability, and improve throughput and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The embodiments of the present invention will be described in detail below. Examples of the embodiments are shown in the accompanying drawings, wherein the same or similar reference numerals indicate the same or similar elements or elements with the same or similar functions. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to explain the present invention, but should not be construed as limiting the present invention.
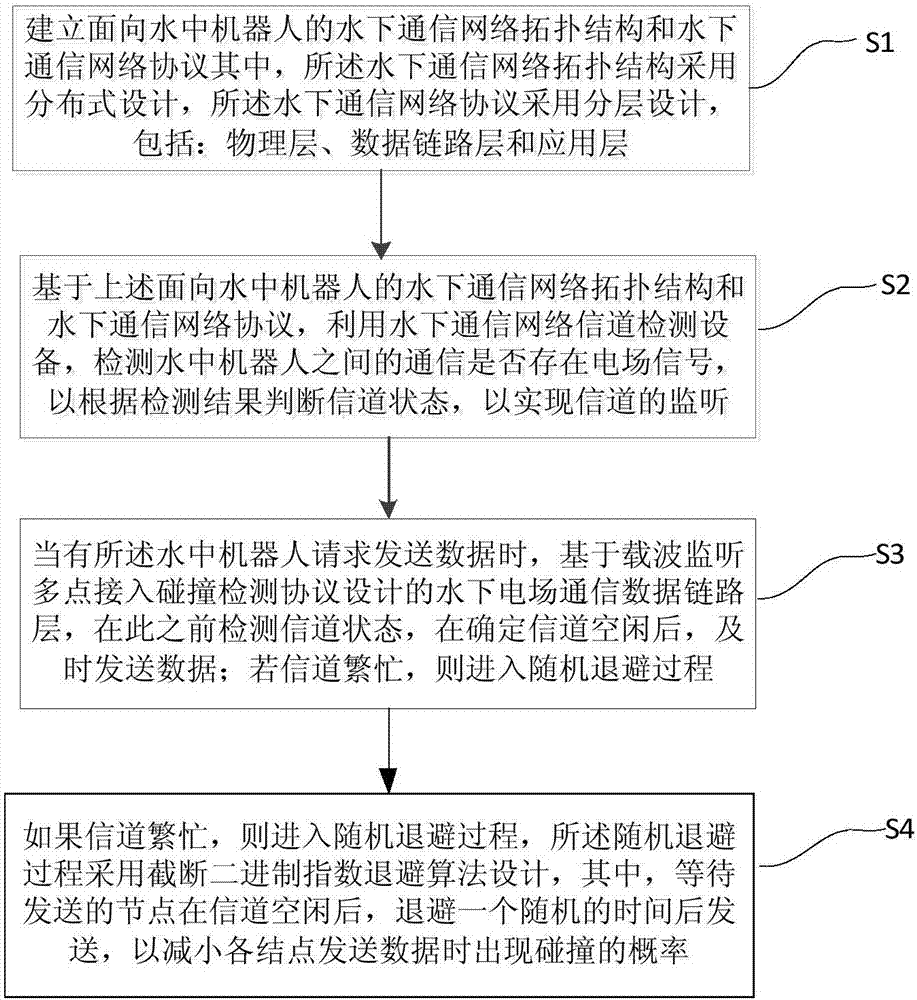
[0038] The embodiment of the present invention proposes an underwater communication method for underwater robots. The method is suitable for the networking, communication, and collaboration of small underwater robots based on electric field communication networks, which is beneficial for multiple underwater robots to complete tasks cooperatively and can solve multiple The problem of communication conflicts between underwater robots can adapt to complex environments, ensure the stability of informati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More