

Rope traction finger rehabilitation training device and method driven by shape memory alloy
A memory alloy, rehabilitation training technology, applied in the direction of muscle training equipment, sports accessories, passive exercise equipment, etc., can solve the problems of poor stability and safety, secondary injury of fingers, insufficient training effect, etc., and achieve noise-free movement. , Fast response speed, the effect of ensuring efficiency and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] Embodiments of the invention include:
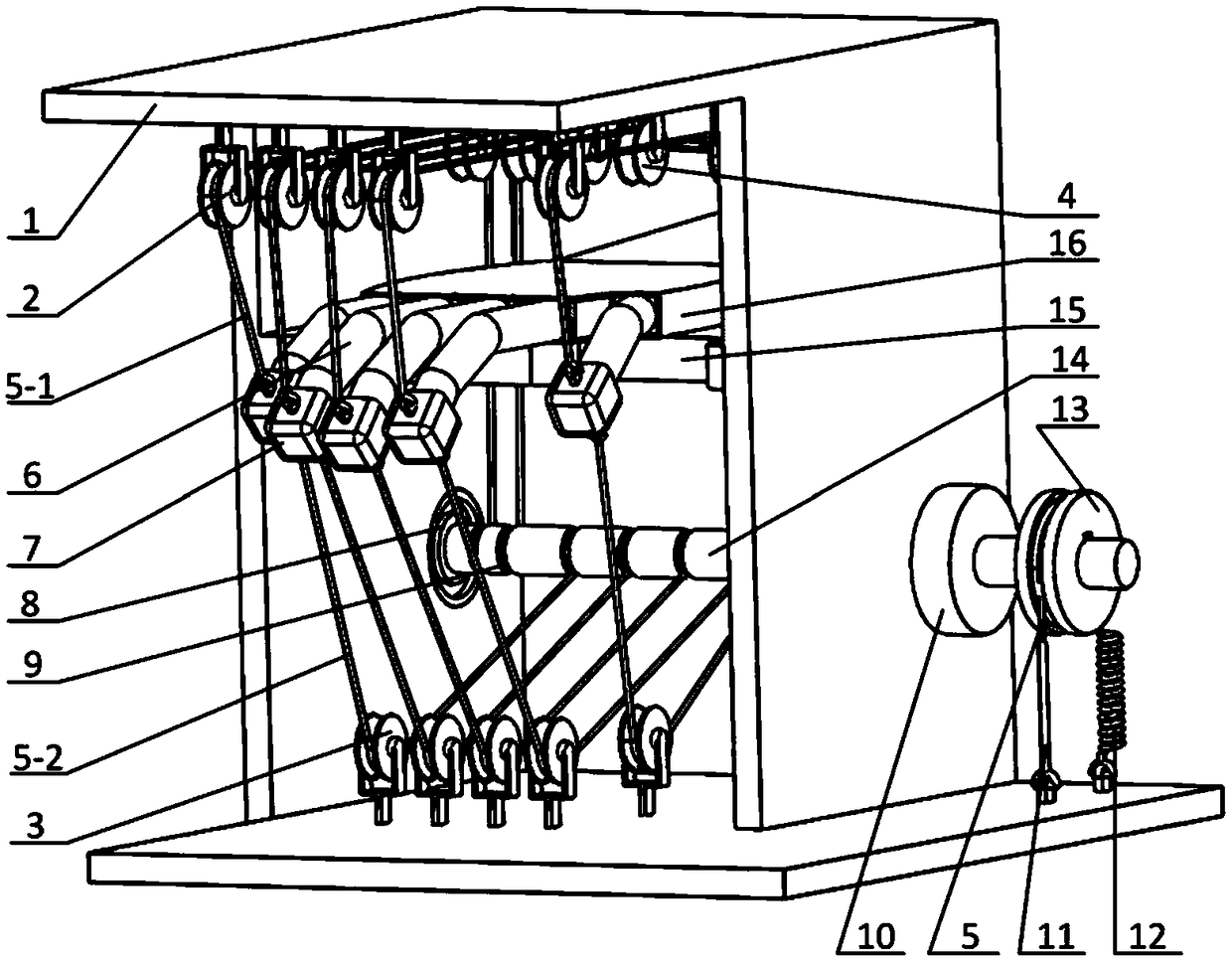
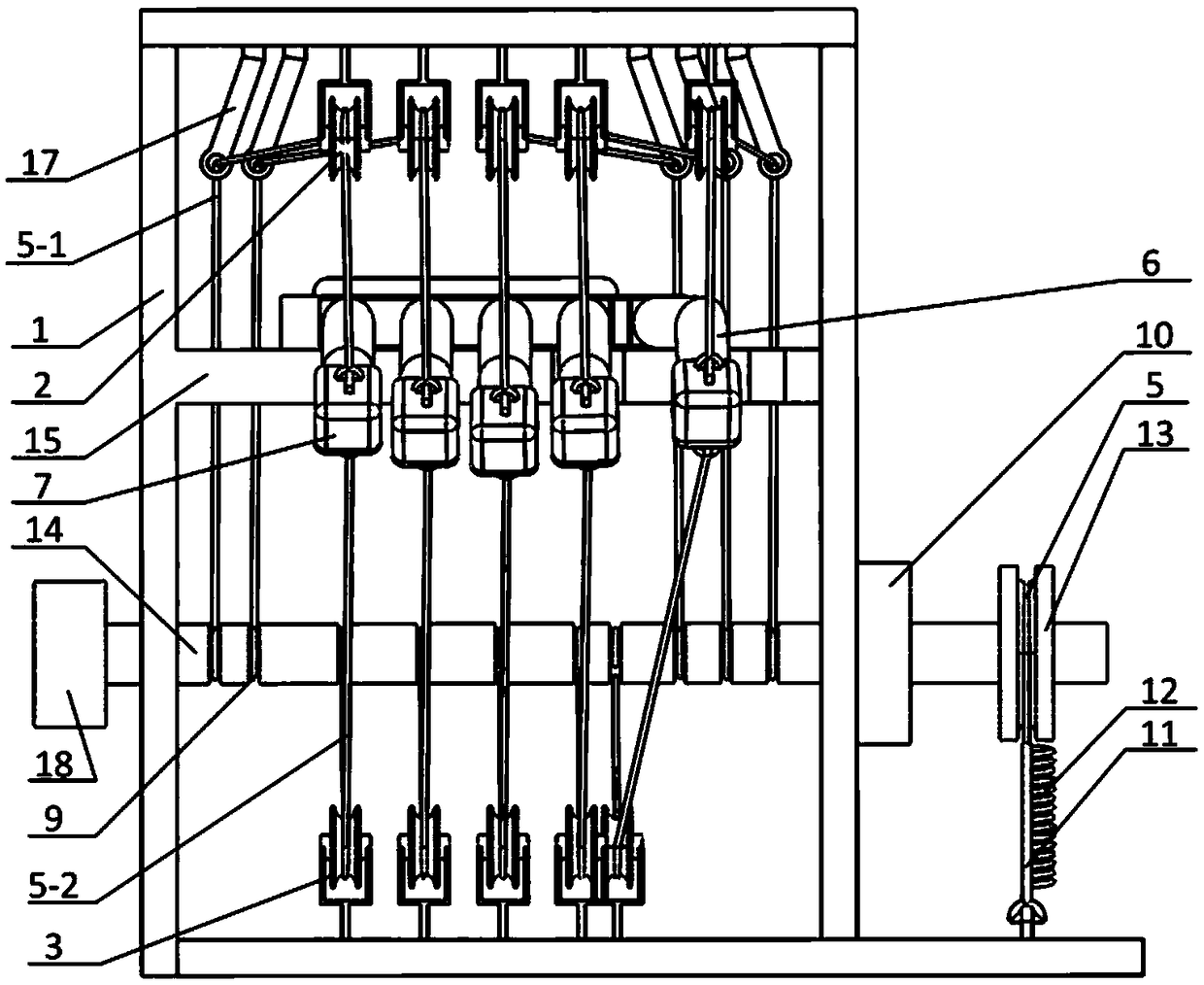
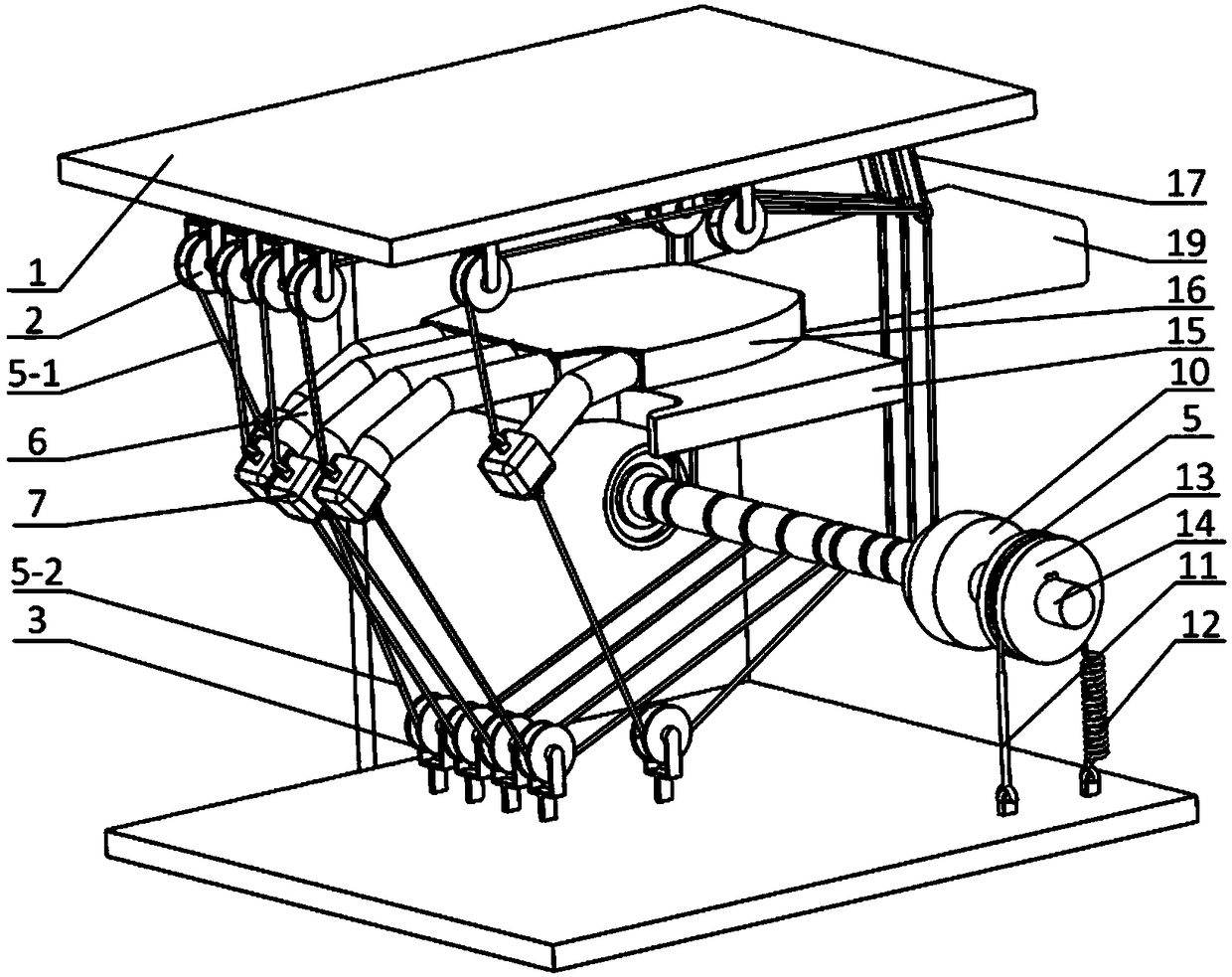
[0047] Such as figure 1 As shown, a shape memory alloy-driven rope traction finger rehabilitation training device includes a vertically arranged frame 1, a fixed platform 15 for supporting the palm, a finger driving mechanism, a finger rehabilitation training mechanism, and a sensing and control system. Wherein: the frame 1 is fixed on the worktable, the fixed platform 15 is used to support the palm, and the place where the fixed platform 15 places the thumb has a hollowed out rectangular groove to prevent from hindering the thumb rehabilitation training.
[0048] Such as figure 1 and as figure 2 As shown, the finger driving mechanism includes a pulley 13, a steel wire rope 5, a shape memory alloy wire 11, and a shape memory alloy spring 12. The pulley 13 is installed on the rotating shaft 14, the steel wire rope 5 goes around the groove of the pulley 13, one end of the shape memory alloy wire 11 is connected to the steel wire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More