

Ostraciidae-imitating autonomous robotic fish
A technology of robotic fish and boxfish, applied to motor vehicles, ships, special-purpose vessels, etc., to achieve the effect of stabilizing underwater movement and improving capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
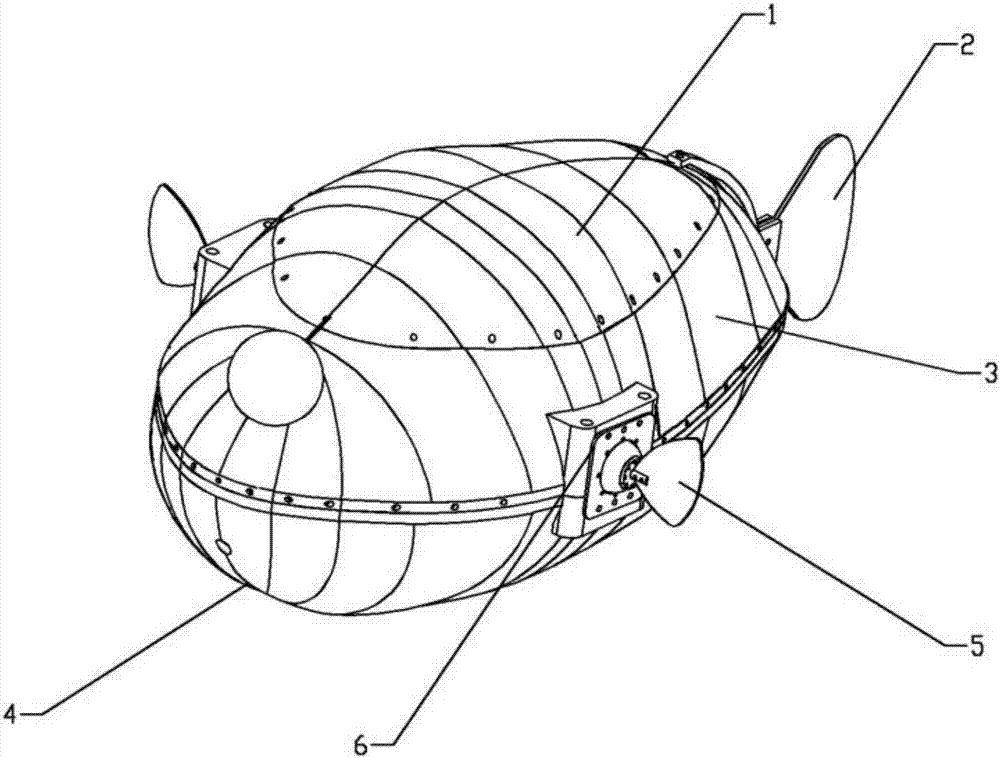
[0032] An autonomous robot fish imitating the boxfish family, comprising an upper shell, a lower shell, a caudal fin and a pectoral fin, the upper shell is divided into an upper shell upper cover 1 and an upper shell connector 3, and an upper shell connector 3 It is connected with the lower shell 4, and a sealing joint 6 is provided at the joint between the pectoral fin and the shell.
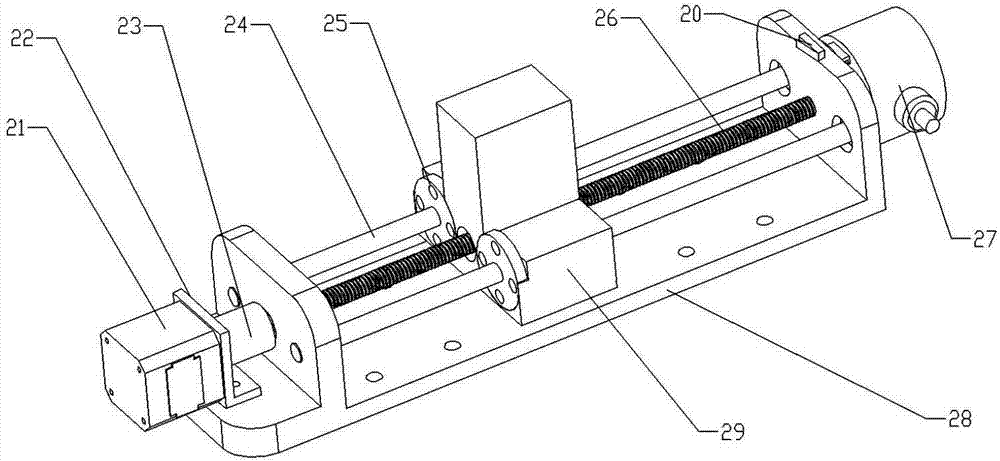
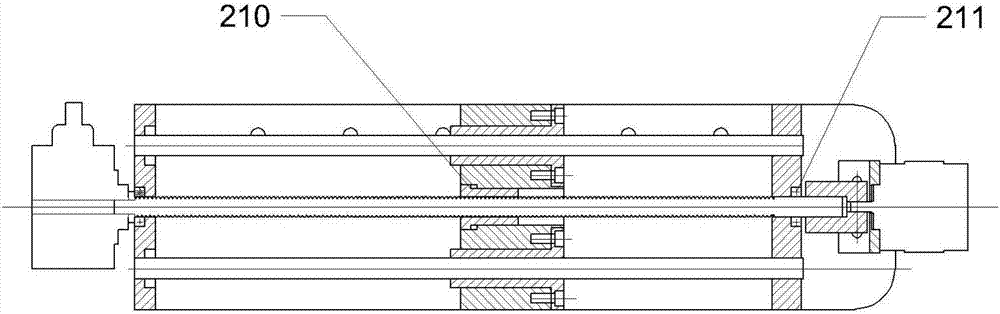
[0033] Also comprise a center of gravity adjustment mechanism, the center of gravity adjustment mechanism includes a mechanism support 28, a counterweight 29, a power source motor 21 and a power source motor support 22, and the power source motor 21 is connected with a ball screw 26 through an elastic coupling 23, and the balls The lead screw 26 is threadedly connected with the ball screw nut 210 on the counterweight 29 , and the counterweight 29 is provided with a linear bearing 25 which is connected with the optical axis 24 . The two ends of the ball screw 26 are provided with deep groove bal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More