

Landscape plant sowing method based on unmanned aerial vehicle (UAV)
A technology for drones and plants, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve the problems of inability to achieve planting, complex boundary shapes of planting areas, time-consuming and labor-intensive, etc., to achieve good landscape modeling visual effects, Improve efficiency and work quality, improve the effect of work quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
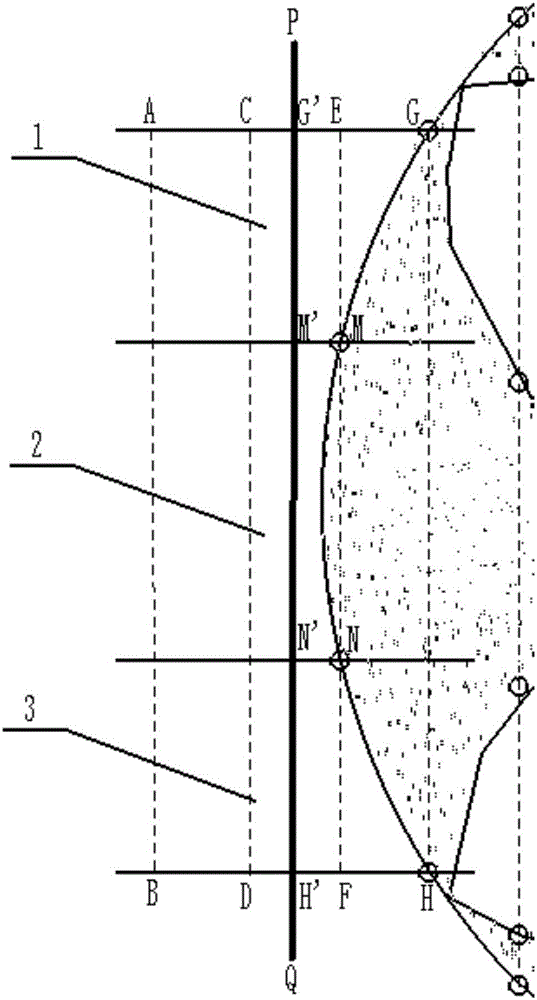
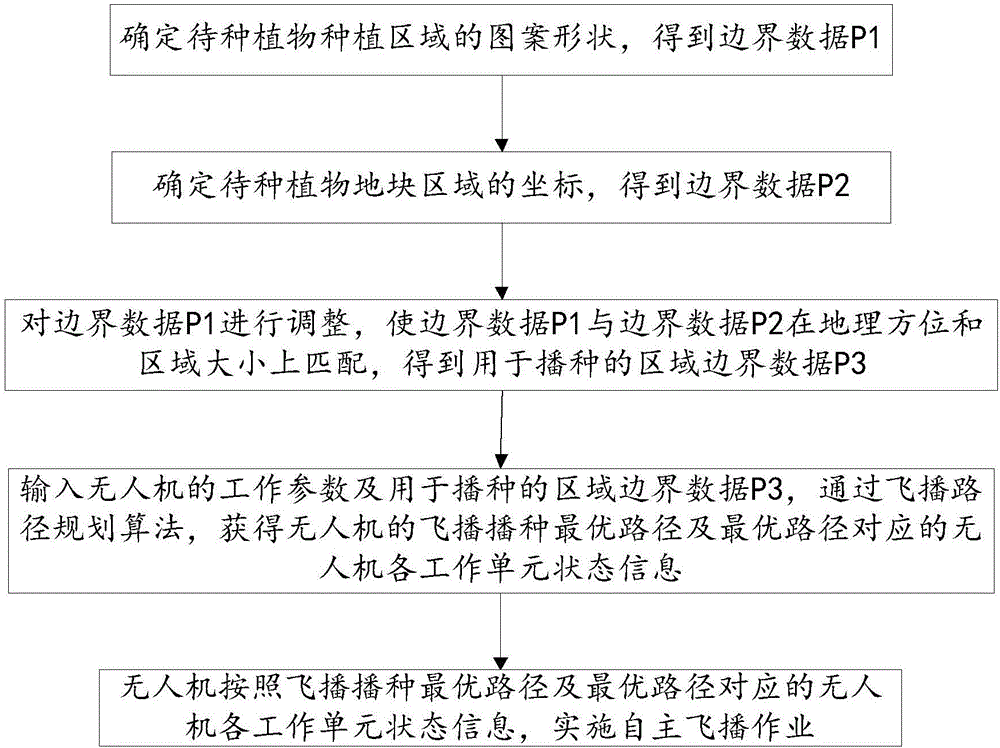
[0039] Such as figure 1 Shown, a kind of sowing method of landscape plant based on drone, comprises the following steps:
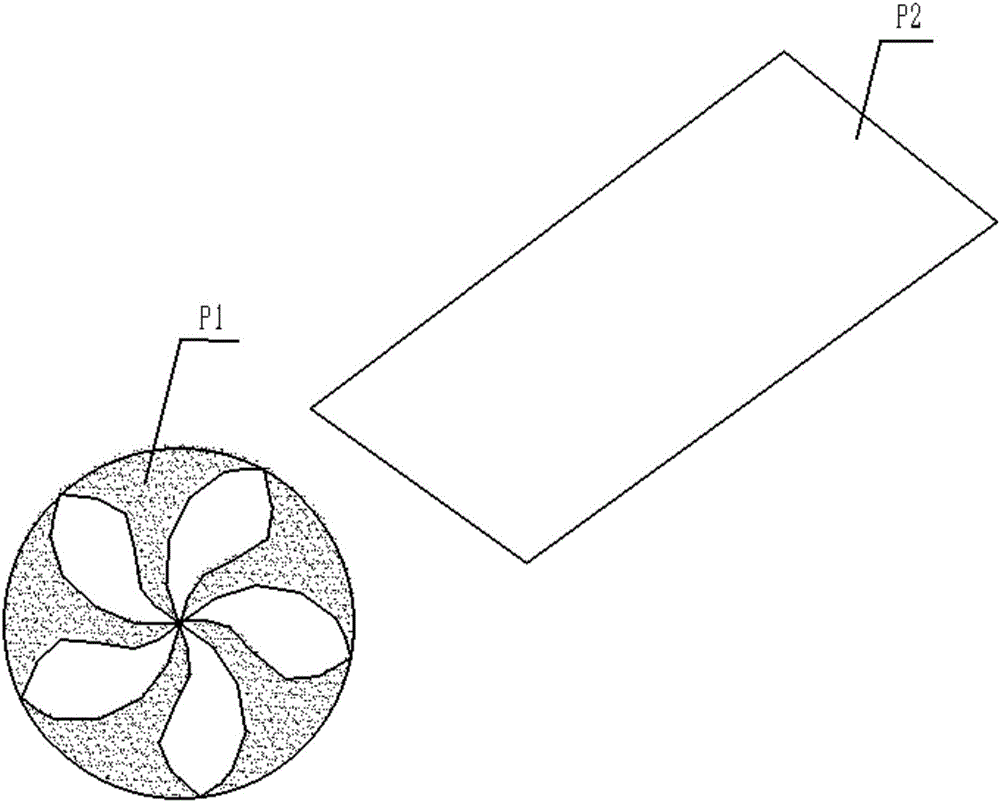
[0040] Step S1. For the specific species of landscape plants to be planted, use drawing software to design and draw the required characters or patterns, and obtain boundary data P1, such as figure 2 shown;
[0041] Step S2, using the GIS system or handheld GPS to obtain the boundary data P2' of the ornamental landscape plot area to be planted in the geographic coordinate format, and convert it into the boundary data P2 in the Cartesian coordinate system through coordinate conversion, such as figure 2 as shown, figure 2 The shaded area in is P1;
[0042] Step S3, such as image 3 As shown...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More