

A method for internal communication of a portable autonomous underwater vehicle
An underwater vehicle and internal communication technology, applied to underwater ships, underwater operating equipment, data exchange through path configuration, etc., can solve the problems of no CAN bus communication mode report, no use of CAN bus, etc., and achieve structural Simple and easy to implement, low hardware system requirements, and the effect of improving utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
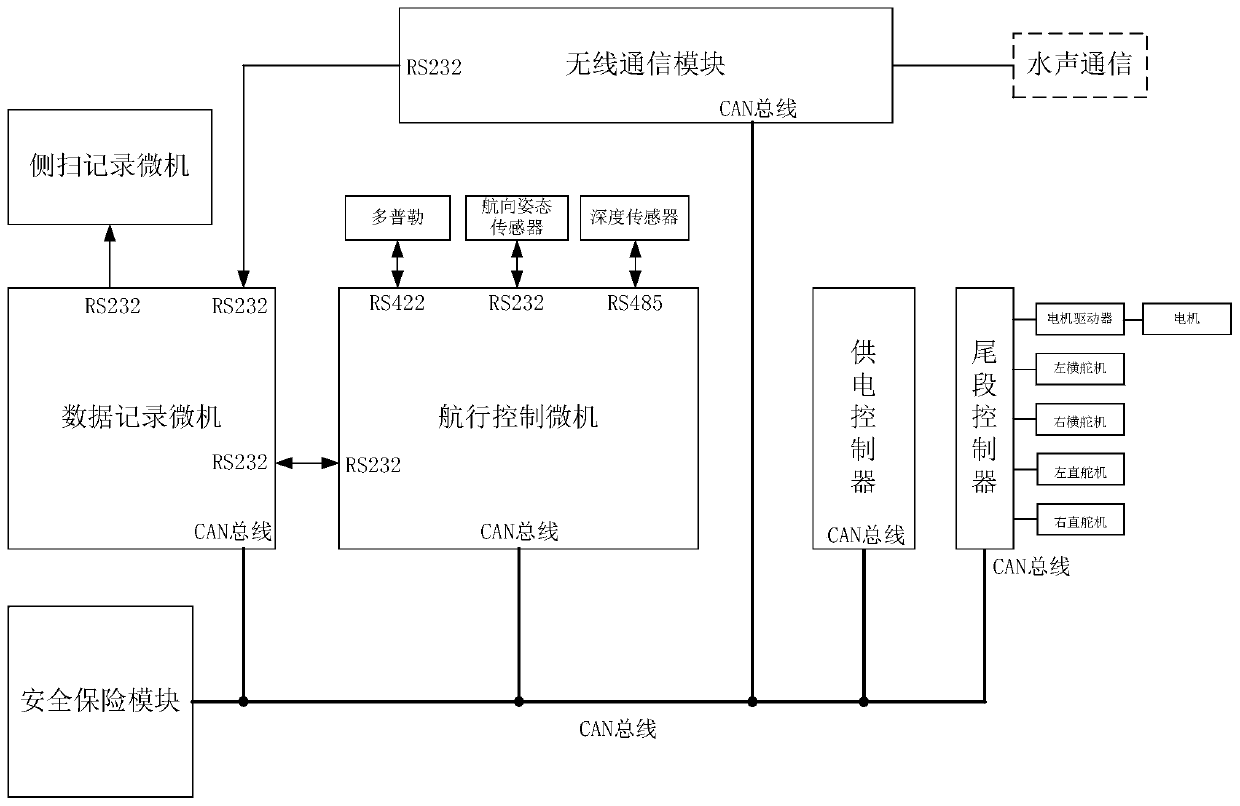
[0055] Embodiment 1: The motor controller node sends a status feedback message to the control microcomputer node, the wireless communication module node and the safety insurance module node at the same time, and the data content is: speed -300 revolutions per second, current 3.52A.
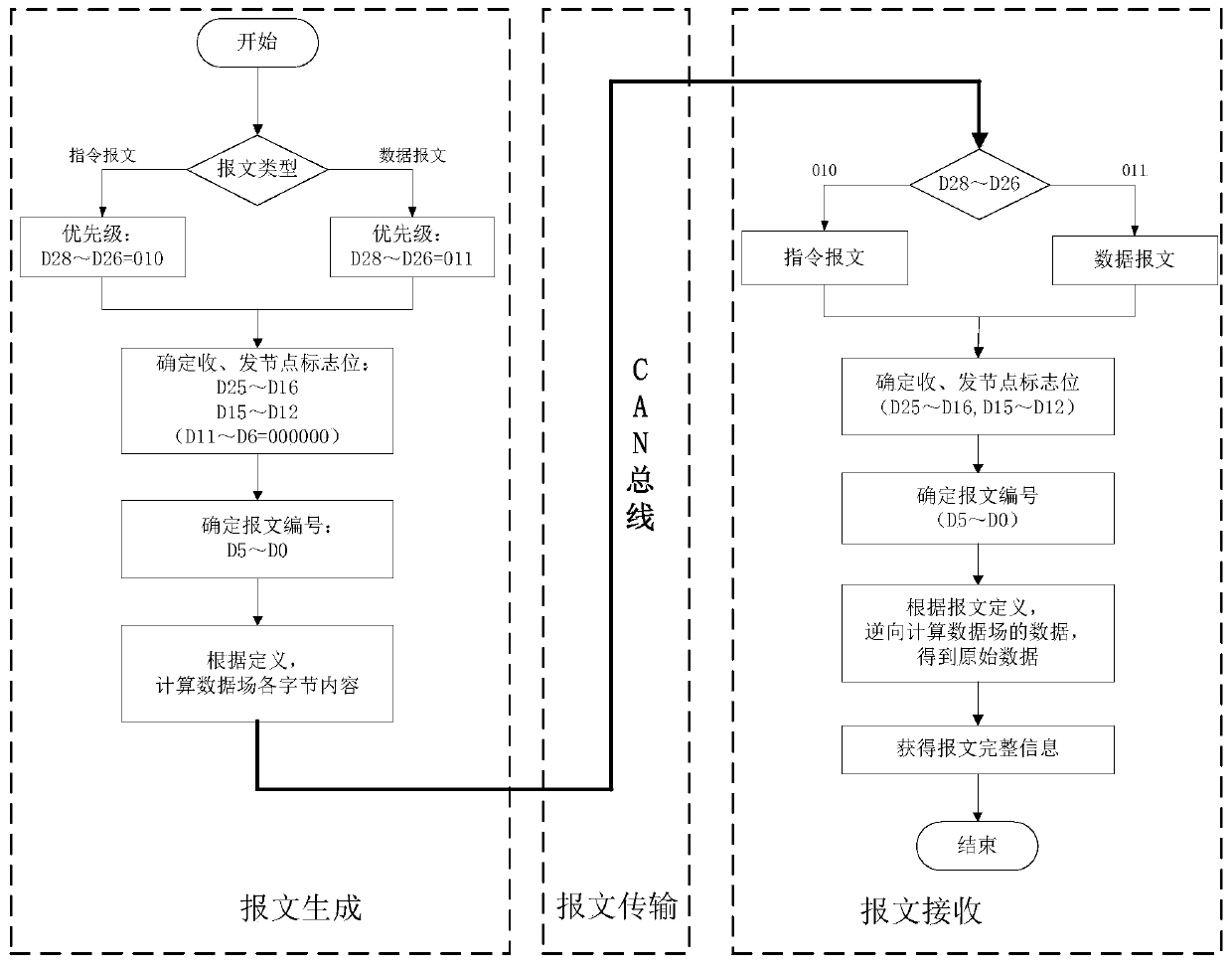
[0056] For the specific process of CAN message communication, please refer to figure 1 :
[0057] 1: The motor controller sends a message, which is a data message, so the priority of the identifier D28~D26=011.
[0058] 2: The data receiving node is the control microcomputer node, the wireless communication module node and the safety insurance module node, and the sending node is the motor controller node, refer to Figure 4 It can be seen that: D25~D16=0111010111, D15~D12=0011. The default value of D11~D6 is 000000.
[0059] 3: The message numbers are D5~D0=000001. Therefore, the 29 flag bits D28-D0=0110111010111001100000 0000001, that is, the message ID=0xDD73001.
[0060] 4: See Figure 6...
Embodiment 2
[0066] Embodiment 2: The wireless communication module node sends a coordinate position data message to the control microcomputer node, and the data content is: east longitude 128.5742 degrees, north latitude 34.6712 degrees.
[0067] For the specific process of CAN message communication, please refer to figure 1 :
[0068] 1: The wireless communication node sends a message, and the message is a data message, so the priority of the identifier D28-D26=011.
[0069] 2: The data receiving node is the control microcomputer node, and the sending node is the wireless communication node, refer to Figure 4 It can be seen that: D25~D16=0111111111, D15~D12=0101. The default value of D11~D6 is 000000.
[0070] 3: The message numbers are D5~D0=000001. Therefore, the 29 flag bits D28-D0=0110111111111010100000 0000001, that is, the message ID=0xDFF5001.
[0071] 4: See Figure 12 It can be seen that: data field 1~4 bytes long int=(128.5742×2 31 ) / 180=1533949955, converted into hexad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More