Method of cooperative self-adaptation intelligent planning of complex mixed path of carrying robot
A hybrid path and intelligent planning technology, applied in the direction of instruments, motor vehicles, transportation and packaging, etc., can solve the problems of unfavorable robot operation, low work efficiency, long calculation time, etc., to reduce simple labor, save time, and improve operation efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
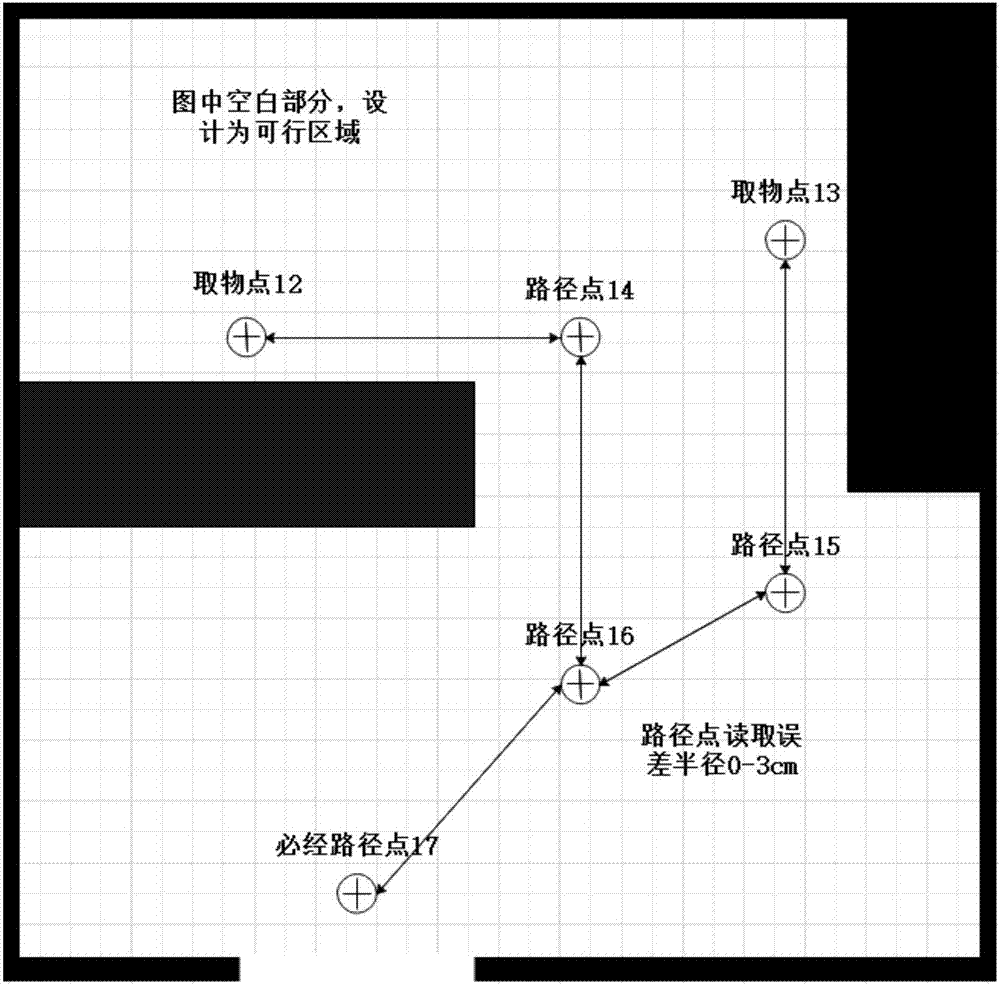
[0093] The carrier robot receives the command, picks up the item from waypoint 12, and places the item at waypoint 76. The middle path track is waypoint 12-14-16-17-33-34-35-36-37-38-98-97- 96-72-73-74-76, eg Figure 1 As shown, the waypoints 12, 14, 15, and 17 are in the room 102 on the first floor, the waypoints 33, 34, 35, 36, 37, and 38 are in the corridor on the first floor, and the waypoint 38 is the waypoint in front of the elevator door. Waypoints 98, 97, and 96 are in the corridor on the 4th floor, and 72, 73, 74, and 76 are in room 405 on the 4th floor. In the middle of the path, you need to pass through 3 gates. Use the elevator once. The waypoint in front of the gate is waypoint 17. , 35, 96.
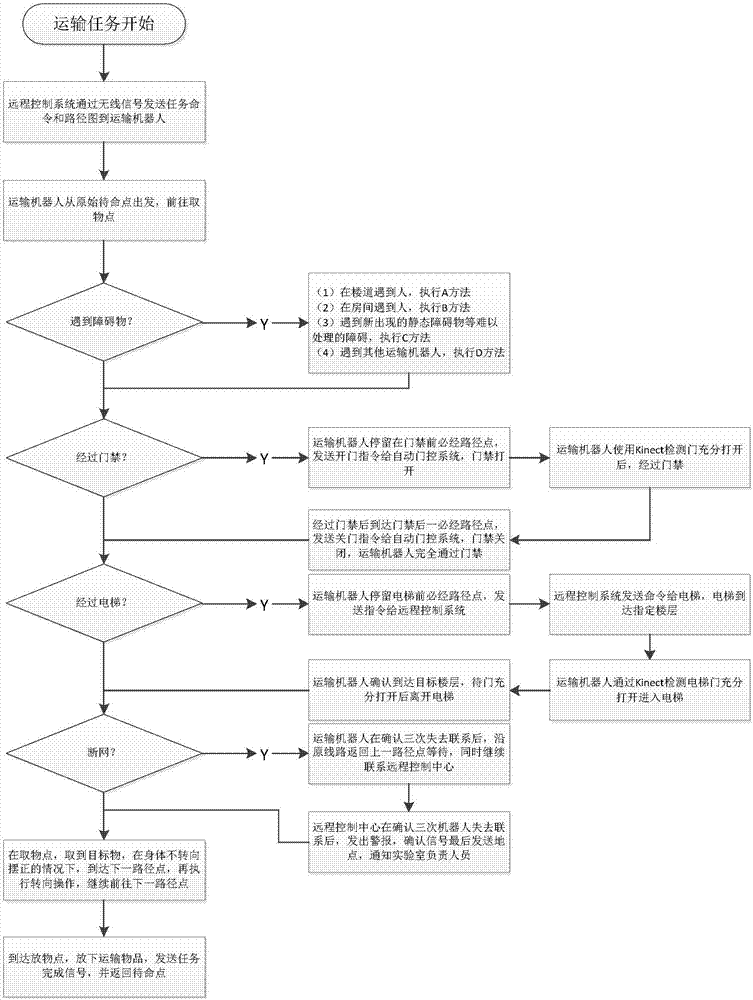
[0094]After the delivery robot obtains the item at the pick-up point, it runs along the command path. When the delivery robot reaches the way point 17, it first sends the door opening command, and then uses the Kinect sensor to detect the opening of the access control. Afte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More